Система управления ДПТ путем регулирования тока возбуждения
Содержание
Введение
1. Определение структуры и параметров объекта управления
2. Разработка алгоритма управления и расчет параметров устройств управления
3. Моделирование процессов управления, определение и оценка показателей качества
4. Разработка принципиальной электрической схемы
Список литературы
Введение
На современ
ном этапе развития техники существенную роль в производстве играет автоматизированный электропривод. Именно с его помощью возможно повышение качества и эффективности труда, экономия затрат на единицу продукции, увеличение количества производимой продукции в единицу времени. Электропривод состоит из двух основных частей: силовой – электрический, электромеханический и механический преобразователи, и информационной – система управления электропривода. Выбор надлежащих элементов силовой части позволит сэкономить потребление электроэнергии. Правильный выбор настройки информационной части поможет сэкономить не только электроэнергию, но и повысить надежность и качество технического процесса, увеличить быстродействие. В данной курсовой работе рассматривается система управления ДПТ путем регулирования тока возбуждения.
1. Определение структуры и параметров объекта управления
В состав объекта управления входит двигатель постоянного тока серии Д-12, ШИП в цепи возбуждения с частотой коммутации 5кГц, тиристорный стабилизатор тока якоря, рабочий орган упруго связанный с двигателем.
Технические данные двигателя Д12:
Номинальная мощность 2.5кВт
Напряжение питания якоря 220В
Напряжение питания ОВ 220В
Номинальный ток якоря 14.6А
Номинальная частота вращения 1140 об/мин
Максимальная частота вращения 3600 об/мин
Момент инерции якоря 0.05 кг*м2
Расчитаем недостающие параметры двигателя, необходимые в дальнейших расчётах. Номинальная скорость привода:
![]()
Максимальная скорость привода:
![]()
Номинальный момент:
![]()
Машинная постоянная:
![]()
Скорость идеального холостого хода:
![]()
Сопротивление обмотки якоря:
![]()
Индуктивность обмотки якоря:
![]()
Жесткость механической характеристики:
Электромагнитная постоянная времени:
![]()
Механическая постоянная времени:
![]()
Принимаем ток возбуждения равным: ![]()
Для двигателя данной мощности постоянная времени обмотки возбуждения:![]()
Сопротивление обмотки возбуждения:
![]()
Индуктивность обмотки возбуждения:
![]()
Рассчитаем параметры упругой двухмассовой системы.
Согласно заданию на курсовой проект ![]()
Частота упругих колебаний ![]()
Коэффициент соотношения масс
![]() ,
,
тогда ![]()
 ,
,
тогда жесткость двухмассовой системы
![]()
Постоянная времени двухмассовой системы
![]()
По заданию электропривод имеет нагрузку в видя вязкого трения первого рода с
![]()
ТП в цепи якоря. Проверим цепь якоря на необходимость применения сглаживающего реактора.
Условие сглаживания тока:
![]() ,
,
![]()
Условие не выполняется, необходимо ввести сглаживающий реактор
![]()
ШИП в цепи возбуждения
Учитывая большую индуктивность обмотки возбуждения и частоту коммутации ключей, пульсаций тока возбуждения не будет.
2. Разработка алгоритма управления и расчет параметров устройств управления
Составим структурную схему модели электропривода
Настройка.
1. Контур тока якоря.
Задание на номинальный ток якоря 10В, тогда
![]() ,
,
коэффициент передачи тиристорного стабилизатора:
![]() .
.
Принимаем постоянную времени тиристорного стабилизатора напряжения ![]() .
.

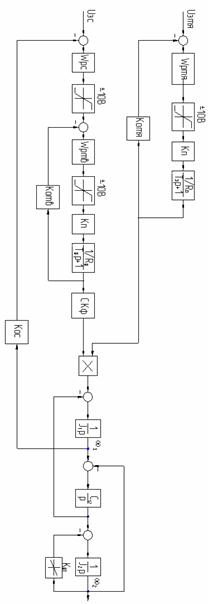
Рис. 1 Структурная схема СЭП.
2. Контур тока возбуждения
Задание на номинальный ток 10В, тогда ![]() .
.
Учитывая возможность форсирования привода по обмотке возбуждения в 2 раза, то ![]() .
.
Принимаем ![]() .
.

3. Контур скорости
Задание на скорость 10В, тогда
 .
.

Для разгона ЭП до ![]() нужно подать задание на скорость
нужно подать задание на скорость
![]() .
.
3. Моделирование процессов управления, определение и оценка показателей качества
Расчетный режим работы
![]()
Максимальное ускорение, развиваемое электроприводом
![]()
Максимальная скорость в режиме слежения
![]()
Расчетная частота
![]()
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск