Теория автоматического управления судовой аппаратуры
На корпусах датчиков, серийно выпускаемых отечественной промышленностью, указываются условные обозначения термосопротивлений.
Статические АСР прямого действия просты по устройству и в сравнении с астатическими могут обладать большей динамической устойчивостью. Рассмотрим работу статической АСР давления воздуха в баллоне 5 (рис. 3, а). Ее регулятор отличается от регулятора астатической АСР т
ем, что в измерителе действие массы груза заменено действием цилиндрической пружины. Пружина 4 нижним концом упирается в жесткий центр мембраны, а верхним – в регулировочную гайку 3. При установившемся режиме сила от давления воздуха на мембрану уравновешивается силой действия пружины, поэтому мембрана и связанный с ней клапан 1 неподвижны. При максимальной нагрузке (W02max) для удержания клапана 1/ в крайнем открытом положении (mmax) давление должно быть равно pоmin.
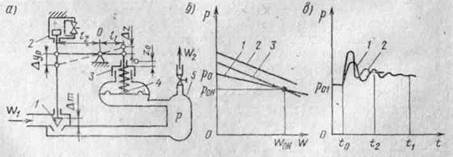
Рис. 3. Статическая AСР прямого действия:
а – принципиальная схема; б – статические характеристики; в–графики переходных процессов
При уменьшении нагрузки W2 давление повышается (происходит приращение р) и клапан 1 перемещается в сторону уменьшения подвода воздуха W1. Если пренебречь инерционностью подвижных масс, то согласно уравнению измерителя (5) с учетом уд= ур = – m/aсв воздействие на клапан 1 и ОР от регулятора в динамике определится зависимостью:
В рассмотренной АСР при увеличении давления выше заданного регулятор в начале переходного процесса прикрывает клапан 1 и уменьшает подвод воздуха W1 на заведомо большую величину, обеспечивая более быстрое восстановление равновесия, а затем, по мере уменьшения отклонения р, вновь приоткрывает его. Движение клапана будет происходить до тех пор, пока не установится соответствие подвода воздуха W01 новому расходу W02 и статическое равновесие сил, действующих на мембрану измерителя.
Переходной процесс АСР может быть затухающим (рис. 3, в) даже в том случае, если ОР неустойчив и обладает запаздыванием. Значения качественных показателей определяются совокупностью свойств ОР, регулятора и ИО. Устойчивость АСР будет тем выше, чем больше устойчивость ОР и меньше отношение.
Настройка АСР может производиться изменением значения коэффициента kр. С уменьшением kp динамическая устойчивость регулятора и АСР возрастает.
Включенный в АСР П-регулятор будет поддерживать заданное значение регулируемого параметра со статической ошибкой, т. е. статические характеристики АСР будут иметь наклон (Рис. 3, б). Так, при нулевой нагрузке W0=0 рассмотренная АСР поддерживает установившееся давление ро при закрытом клапане. С ростом нагрузки до номинального значения Woн клапан откроется на номинальную величину mн= (0,4– : – 0,6) mmax. Однако в этом положении он может удерживаться только при снижении давления до значения рои, что соответствует работе АСР по статической характеристике 1. Значение неравномерности АСР определяется разностью рнер=pо–pон и при правильном включении регулятора должно быть меньше его собственной неравномерности ррнер
Регуляторы прямого действия просты по устройству, обслуживанию в эксплуатации и дешевы в изготовлении, однако при больших усилиях, необходимых для воздействия на ИО, обеспечивают низкое качество процесса регулирования из-за малой работоспособности.
Работоспособность характеризует максимально возможную работу, которую способен совершить регулятор при движении его выходного звена из одного крайнего положения в другое, т. е. максимальное значение произведения силы на путь выходного звена регулятора, измеряемого в Н*м (кгс-см).
В регуляторах прямого действия работоспособность определяется значением движущей силы измерителя и зависит от конструктивных соотношений его подвижных звеньев. Повысить работоспособность можно, например, увеличением массы, активной площади либо объема чувствительного элемента с соответствующим увеличением жесткости пружин измерителя. Однако в этом случае возрастает инерционность регулятора и снижается качество работы АСР в динамике. Поэтому АСР прямого действия получили ограниченное распространение.
Электрические тахометры предназначены для измерения частоты вращения гребных валов, главных двигателей, турбонагнетателей, дизель-генераторов, вспомогательных механизмов и др.
В состав установки тахометров независимо от принципа работы входят датчик, с помощью которого непосредственно измеряется частота вращения (обычно генераторного типа), указатели частоты вращения и проводная линия связи.
Наибольшее применение находят вольтметровые тахометры, в основу работы которых положен принцип измерения напряжения генератора постоянного тока. В этих тахометрах используют практически прямую зависимость напряжения постоянного возбуждения (магнитоэлектрической системы) от частоты вращения его якоря.
Как известно из электротехники, напряжение на зажимах генератора определяется по формуле
U = E – IяRя = сФn – ІяRя
где E – э.д.с. генератора;
Iя – ток якоря;
Rя – сопротивление якоря;
с – постоянная генератора;
Ф – магнитный поток;
n – частота вращения.
Значение IяRя характеризующее падение напряжения в обмотке якоря и в переходном сопротивлении между коллектором и щетками, мало по сравнению со значением Е = сФп. Поэтому можно считать, что U=сФп или при Ф = const U=c1n, где c1 – коэффициент пропорциональности. Из этого следует, что напряжение на зажимах генератора, измеряемое вольтметром, прямо пропорционально частоте вращения якоря генератора, а следовательно, и частоте вращения контролируемого вала. Поэтому шкалу вольтметра можно отградуировать непосредственно в оборотах в минуту или в радианах в секунду.
Схема включения вольтметровых тахометров показана на рис. 4.
Гребной вал 1 через механическую передачу 2 (зубчатые колеса и цепную передачу) передает вращение якорю генератора 3. Последний в зависимости от передаваемой ему частоты вращения подводит электрическое напряжение по проводам 4 к указателям 5, представляющим собой магнитоэлектрические вольтметры. Каждому значению напряжения генератора, зависящему от частоты вращения контролируемых валов, соответствует определенное число оборотов в минуту гребных валов, отмечаемое на шкалах указателей-вольтметров.
Установка судовых тахогенераторов этого типа включает датчик или генератор постоянного тока, указатели или вольтметры, элементы механической передачи от вала к датчику и линию связи или кабели. Датчики представляют собой генераторы постоянного тока с постоянными магнитами. Исходя из принципа работы вольтметровых тахометров требуется, чтобы генератор имел линейную зависимость между значением э. д. с. и частотой вращения, т. е. чтобы Е = сФп = c1nг, для чего магнитный поток Ф генератора должен быть постоянным. Статором генератора служит кольцеобразный постоянный магнит с явновыраженными полюсами. В создаваемом этим магнитом поле вращается якорь с обмоткой. Для регулирования напряжения, развиваемого генератором, между его полюсами устанавливается магнитный шунт 3, принцип, работы которого поясняется на рис. 5.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск