Микропроцессорные системы управления АМТС
Ввиду неизбежного запаздывания в срабатывании исполнительных механизмов по отношению к изменению частоты вращения коленчатого вала для получения качественного процесса регулирования момента Мс необходимо исключить режимы работы двигателя без нагрузки, поскольку это приведет к чрезмерно высокому темпу изменения частоты вращения его вала.
Для удовлетворения данного требования в системе управл
ения предусмотрено частичное включение сцепления, как только водитель откроет дроссельную заслонку на небольшой угол. Это достигается путем принудительного кратковременного открытия клапана 17 (рисунок 2) на 0,15 с несмотря на то, что в данный период nк<nц. В результате последующее увеличение пк будет происходить при наличии нагрузки на двигателе, создаваемой частично включенным сцеплением.
Для плавного изменения момента Мс при его регулировании, осуществляемом открытием и закрытием клапанов 15 и 17, должны быть исключены значительные колебания разрежения в полости 19 сервокамеры 20. В рассматриваемой системе управления это достигается вследствие непрерывно повторяющегося открытия и закрытия на короткие периоды данных клапанов. При этом увеличение момента Мс реализуется за счет того, что общая продолжительность открытого состояния клапана 17 оказывается больше общей продолжительности открытого состояния клапана 15. Если же необходимо уменьшить момент Мс, то это обеспечивается вследствие увеличения общей продолжительности открытого состояния клапана 15 (по сравнению с клапаном 17). После того как значение Мс устанавливается на заданном уровне, оба клапана закрываются.
Если во время разгона автомобиля водитель постепенно увеличивает открытие дроссельной заслонки, то это приводит к повышению «ц, вследствие чего и частота вращения пк при разгоне автомобиля также возрастает.
При этом для повышения момента Мс система управления по мере повышения частоты вращения пк увеличивает общее время открытого состояния воздушного клапана 17, через который полость 19 сервокамеры соединяется с атмосферой. Работа клапанов корректируется также в зависимости от значения ускорений (замедлений) коленчатого вала и ведущего вала коробки передач. По мере увеличения пк возрастает продолжительность импульсов тока I18 (рисунок 7), проходящего через обмотку электромагнита 18 (рисунок 2), и уменьшается продолжительность импульсов тока I16, проходящего через обмотку электромагнита 17. В результате относительная продолжительность открытого состояния воздушного клапана возрастает, а вакуумного клапана 15 — снижается, что и обеспечивает требуемое увеличение Мс при повышении пк.
В результате поступления в процессор информации от датчиков частоты вращения ведущего и ведомого валов коробки передач система управления определяет, какая из передач включена в каждый момент времени. Благодаря этому можно реализовать различный темп включения сцепления после окончания процесса переключения передач в зависимости от порядка их переключения. Данная особенность системы управления позволяет после перехода с высших на низшие передачи уменьшить темп включения сцепления, что обеспечивает плавность движения автомобиля в процессе переключения передач.
Результаты испытаний рассмотренной системы управления показали возможность применения микропроцессорных систем для автоматизации управления сцеплением.
Микропроцессорные системы управления в последнее время все чаще используют для управления ГМП автобусов, грузовых и легковых автомобилей. Система управления фирмы «Аллисон» с условным обозначением АТЕС предназначена для управления трех- пятиступенчатыми ГМП, оборудованными блоком электромагнитных клапанов (ЭМ ГМП). С помощью этих клапанов осуществляется управление исполнительными устройствами (фрикционами) ГМП. Система АТЕС (рисунок 8) является многофункциональной системой управления. В зависимости от сигналов, поступающих от датчика скорости ДС, контролирующего скорость автомобиля, и датчика нагрузки ДН двигателя, микропроцессор в соответствии с заложенной в него программой и с учетом положения контроллера управления KУ вырабатывает команды на переключение передач и блокировку гидротрансформатора. Эти сигналы усиливаются силовыми элементами системы управления и далее поступают к электромагнитам привода соответствующих гидравлических клапанов. Исполнительными устройствами ГМП являются фрикционы, включением и выключением которых управляют указанные гидравлические клапаны.
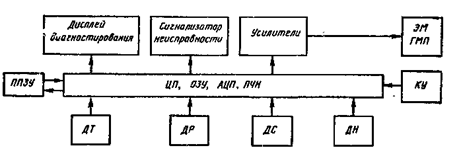
Рисунок 8. Структурная схема микропроцессорной системы управления ГМП грузовых автомобилей
Кроме выработки сигналов на переключение передач система управления осуществляет ряд функций защиты передачи от аварийных режимов, а также используется для диагностирования состояния узлов ГМП по сигналам датчиков температуры масла ДТ и давления в системе ДР.
ГМП является сложным и дорогостоящим агрегатом, поэтому своевременная сигнализация о возможных ее неисправностях позволяет существенно повысить эксплуатационную надежность ГМП. Система может быть применена для управления трансмиссиями различного типа благодаря тому, что корректировка алгоритма управления применительно к различным типам трансмиссий требует лишь изменения программы, записываемой в ППЗУ, т. е. сама система не претерпевает никаких конструктивных изменений.
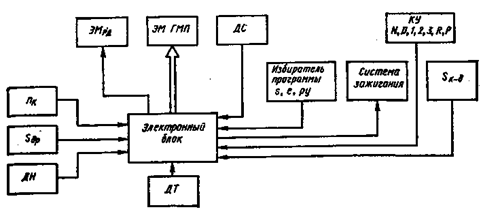
Рисунок 9. Структурная схема микропроцессорной системы управления ГМП
Использование микропроцессорной системы управления ГМП обеспечивает переключение передач при скоростях движения автомобиля, отличающихся не более чем на 1 % от их оптимальных значений. При применении гидравлической системы управления допуск скоростей, соответствующих переключению передач, составляет 5 — 10%.
Сравнительные испытания ГМП с гидравлической и микропроцессорной системами управления показали, что применение последней позволяет экономить до 7 — 8 % топлива.
Система управления АТЕС выполняет следующие защитные функции:
предотвращает возможность включения передачи заднего хода при скорости движения выше установленного предела;
запрещает переключений передач в случае пробуксовывания или блокировки колес автомобиля при торможении, благодаря чему исключается ошибочное действие системы управления;
предотвращает чрезмерное увеличение частоты вращения коленчатого вала при спуске с горы с включенным замедлителем.
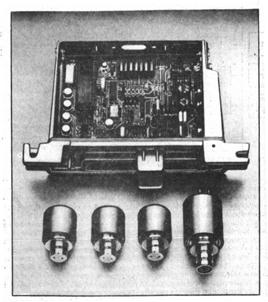
Рисунок 10. Электронный блок микропроцессорной системы управления ГМП и электромагнитные клапаны
Кроме того, система управления,- будучи связанной с встроенными устройствами диагностирования, не только сигнализирует водителю о наличии каких-либо неисправностей или отклонении показателей ГМП от нормы (перегрев масла или недопустимое изменение давления в гидросистеме), но и записывает в памяти эти данные для последующего анализа причин появления неисправностей.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск