Микропроцессорные системы управления АМТС
В программируемые запоминающие устройства ППЗУ (PROM) запись программы может быть осуществлена и после их изготовления на заводе. Поэтому данные устройства целесообразно применять при изготовлении относительно небольших серий микропроцессорных систем управления, особенно если в процессе их выпуска может возникнуть необходимость корректирования алгоритма управления.
В репрограммируемые запом
инающие устройства РПЗУ (EPROM) программа может быть записана несколько раз. Однако эти устройства имеют более высокую стоимость, чем ПЗУ и ППЗУ. Поэтому РПЗУ в основном целесообразно применять только на стадии отладочных работ по микропроцессорным системам.
Для связи между выходами микропроцессора и исполнительными устройствами системы управления используются усилители сигналов или коммутационные элементы (силовые цепи).
Микропроцессорные системы отличаются большим разнообразием с точки зрения примененных типов устройств и их характеристик. Так, разрядность слова, т. е. число одновременно обрабатываемых разрядов, составляет 4 — 16 бит, тактовая частота — от одного до нескольких мегагерц, число уровней прерывания 2 — 8, объем ОЗУ — от 128 байт до нескольких килобайт, объем ПЗУ и ППЗУ — несколько килобайт. Например, объем ПЗУ системы управления двигателем и трансмиссией «Тойота» составляет 7,5 кбайт, объем ППЗУ системы управления сцеплением «Фиат» — 2 кбайт. В качестве ЦПУ могут использоваться как специальные микропроцессоры (например, в системе «Тойота»), так и серийные.
Особо перспективным является применение в системах управления агрегатами автомобилей однокристальных ЭВМ. В состав такой ЭВМ, выполненной в виде одной интегральной схемы, входят центральный процессор, генератор тактовых импульсов, ОЗУ, интерфейс ввода-вывода, таймер, контроллер прерываний, а также какое-либо из постоянных запоминающих устройств (ПЗУ, ППЗУ или РПЗУ с ультрафиолетовой системой стирания программы). Часто в составе одной серии однокристальных ЭВМ выпускают модификации с различными вариантами ПЗУ. Основным преимуществом применения однокристальной ЭВМ является возможность значительного сокращения числа интегральных микросхем, образующих систему управления. Однокристальная ЭВМ в зависимости от структуры микропроцессорной системы управления может заменить 5 — 10 корпусов интегральных микросхем, что помимо уменьшения размеров аппаратуры управления обеспечивает и существенное повышение ее надежности в результате сокращения внешних соединений между корпусами микросхем.
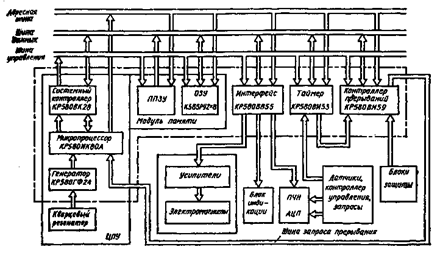
Рисунок 1. Структурная схема микропроцессорной системы автоматического управления переключением передач (на базе комплекта микросхем серии КР580)
На рисунке 1, приведена структурная схема системы автоматического управления переключением передач, основанная на применении микросхем, входящих в состав микропроцессорного комплекта серии КР580.На вход системы подаются сигналы от датчиков скорости автомобиля и частоты вращения коленчатого вала двигателя, температуры двигателя, загрузки автомобиля и др., а также команды, поступающие от аппаратуры управления, на которые воздействует водитель (например, датчик положения педали управления подачей топлива, контроллер управления, запросы на индикацию состояния тех или иных устройств управления или показателей двигателя и коробки передач).
Перед поступлением в собственно микропроцессорную систему управления все эти сигналы обязательно преобразуются в числовой код с помощью соответствующих преобразователей (например, аналого-цифровых преобразователей, преобразователей частота — код и т. д.), входящих в состав блока ввода. Информация от блока ввода поступает в схему интерфейса. Причем в случае большого объема информации таких схем интерфейса может быть несколько.
ЦПУ рассматриваемой микропроцессорной системы состоит из трех микросхем. Большая интегральная схема микропроцессора типа КР580ИК80А обрабатывает всю информацию. Ее связь с шинами управления и данных осуществляется через системный контроллер — шинный формирователь, а формирование тактовых последовательностей импульсов, необходимых для работы БИС микропроцессора, происходит с помощью генератора, стабилизированного кварцевым резонатором. В зависимости от вырабатываемых ЦПУ сигнала на шине управления и кода на шине адреса в работу с ним включается то или иное устройство микропроцессорной системы. Например, когда ЦПУ выдает на шину адреса код, требуемый для активизации соответствующего канала интерфейса, а на шину управления подает сигнал ввода, информация от данного канала интерфейса поступает в ЦПУ для последующей обработки.
В случае необходимости аналогичным образом осуществляется подача команд на обмен информации между ЦПУ и другими элементами микропроцессорной системы. При этом для работы с запоминающими устройствами ЦПУ выдает на адресную шину адрес ячейки памяти, а на шину управления команду «чтение» или «запись».
Для функционирования системы автоматического управления переключением передачи необходимо предусмотреть быстрое изменение режимов работы системы в зависимости от некоторых факторов. К числу таких факторов можно, например, отнести отказы тех или иных датчиков, приводящие к созданию аварийной ситуации, наличие юза при торможении автомобиля, непредусмотренные изменения напряжения питания системы.
Для того чтобы микропроцессорная система оперативно реагировала на указанные отклонения от нормальной работы, в ней используется система прерываний, реализуемая с помощью контроллера прерываний. К каждому входу или к части входов контроллера прерываний подводятся сигналы от внешних устройств. При появлении на каком-либо из входов контроллера сигнала с уровнем, соответствующим состоянию «логической 1», он посылает по линии запроса в ЦПУ запрос на прерывание его работы по основной программе. В зависимости от того, на какой из входов контроллера поступает сигнал с уровнем, соответствующим «логической 1», контроллер подготавливает информацию ЦПУ о том, на какую из подпрограмм ему следует перейти. Если сигналы с уровнем, соответствующим «логической 1», будут поданы одновременно на несколько входов контроллера, то он подготавливает для ЦПУ информацию о переходе на подпрограмму, предусмотренную сигналом внешнего устройства с самым старшим приоритетом.
При поступлении запроса от контроллера на прерывание ЦПУ сначала заканчивает выполнение текущей команды, а затем выдает на управляющую шину сигнал разрешения прерывания, т. е. готовность перехода от основной программы к подпрограмме. После этого контроллер информирует ЦПУ, на какую из подпрограмм ему следует перейти. По окончании выполнения этой подпрограммы ЦПУ либо по сигналу контроллера прерывания переходит на новую подпрограмму, запрос на которую поступил к контроллеру от следующего по старшинству приоритета внешнего устройства, либо при отсутствии таких запросов возвращается к выполнению основной программы.
Выполнение ЦПУ подпрограмм в порядке, определяемом старшинством приоритета внешних устройств, обеспечивает первоочередную реализацию в системе управления переключением передач таких управляющих воздействий, которые являются наиболее важными для автомобиля. В частности, старшим приоритетом, как правило, обладают внешние устройства, сигнализирующие о неполадках в системе управления, могущих создать для автомобиля аварийную ситуацию.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск