Магнитоэлектрический бесконтактный генератор с импульсным регулятором напряжения
Проведенные выше расчеты позволяют привести общую структурную схему связывающую силовую часть стабилизатора с выпрямителем и собственно с генератором, эта схема приведена на Рисунке.28.
2.6 Выбор схемы управления импульсного стабилизатора
2.6.1 Выбор способа управления
Данная схема управления должна реализовывать внешнюю характеристику показанную на рисунке. 29 , то есть обеспечить
регулирование напряжения в 28 В во всем диапазоне изменения тока, и ограничивать ток при его значениях выше 30 А. Выбросы тока более 30 А могут возникать при коротких замыканиях, сильном разряде АБ и т.д, это может привести к повреждению генератора и стабилизатора. Наклоны характеристик показаны условно ввиду того, что требуемый наклон будет определен при динамическом расчете стабилизатора, о чем будет сказано далее.
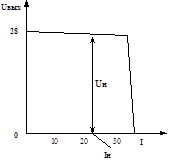
Рис.29 Внешняя характеристика стабилизатора.
Регулирование мощности при помощи силового транзисторного ключа работает по принципу импульсного регулятора. Принцип импульсного регулирования заключается в периодическом подключении нагрузки к источнику напряжения с помощью ключа Изменение напряжения и ограничение тока, подаваемого на нагрузку осуществляется с помощью изменения ширины импульсов управляющих транзисторов VT1-VT3 (см.Рисунок 28). Это широтно-импульсный метод регулирования. Причем в нашем случае применяется метод ШИМ 2-го рода (сигнал обратной связи сравнивается с пилообразным сигналом).
Для такой системы регулирования необходимы обратные связи по току и напряжению. Нужна информация с датчиков тока и напряжения.
Система должна работать следующим образом. Сигнал обратной связи (ОС) вычитаясь из сигнала задания Uзад, образует сигнал управления Uупр, который поступает на элемент сравнения, где сравнивается с сигналом пилообразной формы.
То есть длительность очередного импульса определяется интервалом изменения пилообразного сигнала Uпил от нуля в начале импульса до разности сигналов задания и обратной связи в конце. Временные диаграммы показывающие работу данной системы приведены на Рисунке.30.
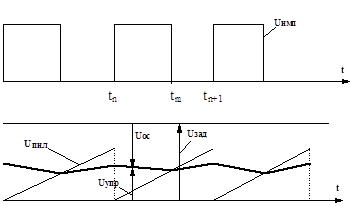
Рис.30 Временная диаграмма работы модулятора.
Блок схема реализующая данный принцип управления показана на Рисунке.31.
2.6.2 Выбор схемы управления стабилизатором
Для реализации данной блок схемы (см.Рис.31) в качестве датчика тока применим резистор Rт, датчик напряжения собран на делителе напряжения с резисторами R20 и R21 (см.Принципиальную электрическую схему Рис.32). Для расчета R20 и R21 восползуемся допущением, считаем что через делитель ДН течет ток Iд=5 мкА, а на резисторе R20 должно падать 10 В получим примерно 2 кОма (R20=UR20/Iд), остальное напряжение должно падать на R21 то есть R21=Uнагр/Iд-R20=3.6 кОм.
Для получения разности сигнала задания (опорного напряжения) и сигнала обратной связи применяются операционные усилители включенные по дифференциальной схеме. Они выполняют операцию вычитания сигнала ОС с датчиков тока, напряжения и сигнала задания, в тоже время обеспечивают необходимый заданный коэффициент усиления Ki и Ku, который обеспечивается обратными связями собранными на резисторах включенных в цепь ОС операционных усилителей.
Однако нужно сделать замечание, обозначенные на принципиальной схеме резисторы у операционных усилителей DA2, DA3, DA4 выбраны прикидочно, так как они могут не обеспечивать устойчивую работу схемы. Выбор коэффициентов усиления для обеспечения оптимальной настройки регулятора будет рассматриваться ниже при динамическом расчете схемы управления стабилизатором.
Сформированный сигнал управления должен поступать на элемент сравнения, для этого один из входов этого элемента надо подать пилообразный сигнал. Этот сигнал организуется с помощью мультивибратора собранного на компараторе DA1, причем "пила" образуется за счет различного времени заряда и разряда конденсатора С1 с помощью цепей R1VD1 и R3VD2, которые регулируют скважность сигналов на выходе мультивибратора.
2.6.3 Работа схемы управления стабилизатором
Схема состоит из генератора пилообразного напряжения собранного на микросхеме DA1, усилителей обратной связи DA2, DA3, DA4, ШИМ - компараторов DA5, DA6.
Пилообразное напряжение с выхода 4 DA1 поступает на вход ШИМ- компараторов DA5, DA6, на другие входы которых поступают сигналы с микросхем DA3, DA4. Обратная связь по напряжению организована на ОУ DA4, на один вход подключен источник опорного напряжения, а на второй вход подключен сигнал с датчика напряжения. Коэффициент усиления обеспечивается резисторами R24, R25, R22, R23. На этом ОУ происходит вычитание сигнала обратной связи из опорного.
Обратная связь по току организована на ОУ DA2, на базе дифференциального включения с коэффициентом усиления по напряжению примерно 100 для увеличения маленького потенциала поступающего с точки 1 (см.Рис.32), и DA3, который представляет усилитель постоянного тока на один вход которого подключены источник опорного напряжения и сигнал с DA2 (сигнал ОС по току), на второй вход заведена обратная связь с коэффициентом усиления по напряжению примерно 1.025.
С выхода ШИМ- компараторов сигналы поступают на логический элемент ЛЭ "или", собранный на схеме D1, который определяет работу той или другой обратной связи.
Для устранения дополнительных переключений за один период, при односторонней модуляции используется RS-триггер на микросхеме D2. В начале каждого такта импульсом с задающего генератора (им также является мультивибратор на микросхеме DA1), через транзистор VT1, RS-триггер переводится с состояния лог "1" и логический сигнал с выхода Q поступает на транзисторы силового ключа.
В результате возрастания сигнала ОС на выходе схемы сравнения появляется импульс положительной полярности, что переводит его в состояние "0", происходит выключение транзисторов. Обратное переключение триггера в оставшуюся часть периода невозможно, чем устраняется дополнительное переключение в силовом ключе.
Стабилизация выходного напряжения и тока реализована в замкнутой системе регулирования за счет того, что при изменении сигнала обратной связи, например его снижении по какой-либо причине, происходит расширение импульсов на выходе компаратора DA5 или DA6 и следовательно на транзисторах импульсного элемента (ИЭ).
2.7 Динамический расчет стабилизатора
Работа импульсной части зависит от силовой схемы, непрерывной- от свойств электрических элементов нагрузки, логической- от закона модуляции, реализуемого в схеме управления широтно-импульсного преобразователя.
При наличии обратных связей электромагнитные процессы в преобразователе зависят не только от характера электрической нагрузки, но и от динамических свойств рабочего механизма.
Практически установлено, что динамические характеристики замкнутых контуров в значительной степени зависят от логики работы схемы управления (см.Рис 30, 31). Рассматриваемые контуры регулирования являются нелинейными и дискретными по принципу действия. Для их описания удобнее применять нелинейные разностные уравнения. Анализ систем с широтно-импульсными преобразователями включает расчет электромагнитных процессов в замкнутом контуре, моделирование с учетом нелинейностей и дискретного характера работы, определению областей устойчивой работы системы.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск