Синтез системы угловой стабилизации дозвукового транспортного самолета по заданному курсу
Содержание
Введение
1 Уравнение движения рыскания
2 Датчики сигналов о параметрах движения летательных аппаратов
3 Основные законы управления автопилотов
4 Рулевой привод с жесткой обратной связью
5 Синтез системы
Вывод
Список использованной литературы
="center">
Введение
В результате непрерывного развития техники к настоящему времени созданы разнообразные по конструктивному исполнению и решаемым задачам летательные аппараты (ЛА) – от простейших воздушных шаров, дирижаблей, дельтапланов до сверхзвуковых реактивных самолетов, управляемых ракет и автоматических межпланетных кораблей.
Основным назначением любого ЛА является осуществление полета по требуемой траектории. При этом движение ЛА можно рассматривать состоящим из движения центра масс и углового движения вокруг центра масс. Необходимость управления угловым движением вызывается тем, что ЛА должен занимать вполне определенное положение по отношению к вектору скорости центра масс. В частности, для самолетов и ракет продольная ось ЛА должна совпадать или быть близкой к направлению вектора скорости.
При движении ЛА в пределах атмосферы на него действуют сила тяги, аэродинамические силы, зависящие от режима полета и состояния атмосферы, сила тяжести. Под действием указанных сил движение ЛА непрерывно возмущается, а параметры полета отклоняются от расчетных.
Для устранения возникающих отклонений от заданного режима полета производятся изменение режима работы двигателя и отклонение соответствующих рулей управления ЛА.
На пилотируемых ЛА рули отклоняются пилотом с помощью системы ручного управления. Для обнаружения отклонений ЛА от заданного режима пилоту необходимо вести непрерывное наблюдение, как за видимыми ориентирами, так и за показаниями многочисленных приборов. Для устранения непрерывно возникающих отклонений ЛА, т. е. для удержания его в заданном режиме полета, пилоту приходится непрерывно воздействовать на органы управления. Все это приводит к быстрой утомляемости пилота и в результате к снижению точности выдерживания заданного режима полета, к увеличению времени для решения задач, возникающих в полете. Поэтому почти одновременно с появлением первых ЛА возникло стремление к автоматизации управления полетом.
Автоматические устройства управления полетом выполняют на ЛА следующие основные функции:
- управляют движением центра масс ( высотой полета, боковым отклонением, скоростью полета и т.д.);
- управляют угловым движением (поддерживают неизменными или изменяют в соответствии с сигналами команды углы тангажа, рыскания и крена);
- улучшают динамические характеристики ЛА (обеспечивают демпфирование, устойчивость, управляемость).
При автоматическом управлении движением ЛА должны быть достигнуты: заданное качество переходного процесса, требуемая точность исполнения команд, слабая реакция на внешние возмущения, безопасность полета.
1 Уравнение движения рыскания
Допустим, что ЛА совершает горизонтальный полет с постоянной скоростью и управляется автопилотом. Для получения уравнений движения рыскания приравняем проекции внешних и инерционных сил на нормаль (ось Oz) к траектории, а также внешний и инерционный моменты относительно нормальной оси ЛА (оси Oyc):
где Z – боковая аэродинамическая сила;
Y - угол поворота траектории;
Iy – момент инерции ЛА относительно связанной оси Oyc;
wy – скорость рыскания (угловая скорость ЛА относительно оси Oyc);
My – аэродинамический момент рыскания.
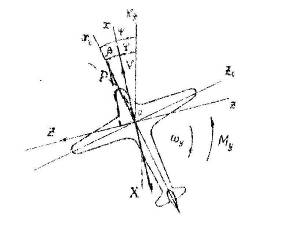
Рис.1. Схема сил и моментов действующих на объект
Линейные дифференциальные уравнения движения рыскания имеют вид:
 ,
,
где для постоянных коэффициентов введены следующие обозначения:
Нулевой индекс у скобок обозначает, что производная и параметры взяты для выбранного невозмущенного движения.
В некоторых случаях уравнения движения рыскания еще более упрощают. Дальнейшее упрощение этих уравнений основывается на том, что в большинстве режимов полета руль направления устраняет скольжение и можно положить, что Db=0. Тогда движение рыскания будет описываться одним уравнением:
![]()
Это же уравнение описывает движение ЛА, нейтрального в путевом отношении, т.е. ЛА, у которого коэффициент момента путевой устойчивости равен нулю: ![]() .
.
Если пренебречь движением центра масс под действием боковых сил и рассматривать лишь колебания продольной оси ЛА относительно вектора скорости, т.е. положить Db=Dy, то уравнение движения примет вид:
![]()
2 Датчики сигналов о параметрах движения ЛА
Характеристиками датчиков являются передаточные функции и статические погрешности. Статические погрешности датчиков должны быть меньше допустимых погрешностей процессов управления. Динамические погрешности датчиков, определяемые по передаточным функциям, в полосе пропускания контура ЛА-АП должны быть малы.
Для измерения углов тангажа, рыскания и крена ЛА применяются свободные гироскопы (на беспилотных ЛА с малым временем полета), корректируемые трехстепенные гироскопы и гироскопические системы типа гировертикалей, гироскопов направления, курсовертикалей, пространственных гиростабилизированных платформ. Иногда (для беспилотных ЛА) для измерения угла применяются двухстепенные интегрирующие гироскопы.
При исследовании системы стабилизации ЛА-АП датчики углов будем считать безынерционными звеньями, полагая, что
![]()
где ![]() - напряжение, снимаемое с гироскопического датчика угла;
- напряжение, снимаемое с гироскопического датчика угла;
kГ – коэффициент передачи гироскопа;
![]() - угол, измеряемый гироскопом.
- угол, измеряемый гироскопом.
Измерение угловых скоростей ЛА осуществляется двухстепенными или трехстепенными гиротахометрами (ГТ). В последние годы для этих целей начали применять ГТ, построенные на базе лазерных и вибрационных гироскопов. ГТ на базе обычного и вибрационного гироскопа можно рассматривать как колебательное звено. Однако, если собственная частота ГТ выбрана порядка 10-50 Гц, то такой прибор будет иметь малые динамические погрешности при измерении угловых колебаний ЛА по тангажу, рысканию и крену, происходящих с частотой, обычно не превышающей несколько герц. Уравнение датчика угловой скорости, частота собственных колебаний которого во много раз превышает частоту изменения измеряемой угловой скорости, при исследовании системы ЛА-АП будем записывать в виде:
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск