Анализ качества дискретных систем управления
Решение:
1. Определим значение выходной величины y(z)

2. Определим установившееся значение выходной величины y¥
![]()

3. Определим R(z)
 ,
,
где d=T1 /(T1 +k).
4. Определим величину интеграла J2 с помощью вычетов z1 = d
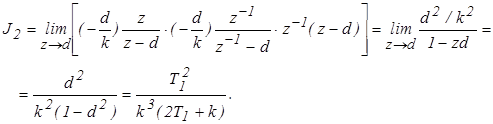
![]()
5. Определим величину интеграла J2 с помощью таблиц

4. Точность дискретных систем управления
Точность дискретных САУ оценивается аналогично, как и непрерывных, с учетом некоторых особенностей.
Изображение ошибки для дискретной системы равно
![]() (5)
(5)
Установившееся значение ошибки определяется с помощью теоремы о конечном значении дискретной функции
![]() (6)
(6)
При определении ошибок используют типовые воздействия, дискретные преобразования Лапласа для типовых воздействий имеют вид:
-для воздействия с постоянной амплитудой
 (7)
(7)
-для воздействия с постоянной скоростью
 (8)
(8)
-для воздействия с постоянным ускорением
 (9)
(9)
Рассмотрим ошибки в дискретных системах. Ошибки в системах управления можно классифицировать как статические, кинетические и инерционные.
Статическая ошибка – это ошибка, возникающая в системе при отработке единичного воздействия.
 (10)
(10)
Кинетическая ошибка – это ошибка, возникающая в системе при отработке линейно – возрастающего воздействия.
 (11)
(11)
Инерционная ошибка – это ошибка, возникающая в системе при отработке квадратичного воздействия.
![]()
Рассмотрим примеры расчета установившихся ошибок в дискретных системах.
Пример 1. Для заданной системы (рис. 5) определить установившиеся ошибки.
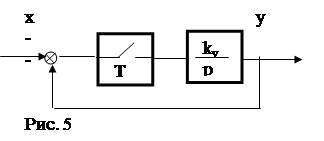 |
Решение: Определим выражения для установившихся ошибок.
1. Статическая ошибка

2. Кинетическая ошибка

3. Инерционная ошибка

Пример 2. Для заданной системы (рис. 6) определить установившиеся ошибки.
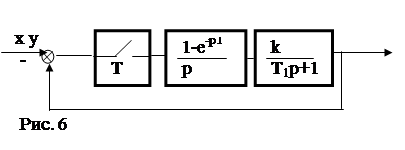 |
Решение:
1. Определим передаточную функцию разомкнутой системы
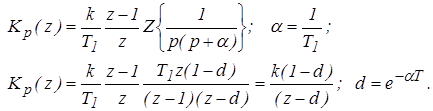
2. Определим передаточную функцию системы по ошибке
3. Определим статическую ошибку

4. Определим кинетическую ошибку

Пример 3. Для заданной системы (рис. 7) рассчитать установившиеся ошибки, если алгоритм функционирования цифровой части описывается уравнением:
![]()
 x y
x y
Рис. 7
Решение: Исходную схему можно представить в виде (рис. 8).

Рис. 8
1. Определим передаточную функцию разомкнутой непрерывной части
Выполним дискретное преобразование

2. Определим передаточную функцию цифрового автомата в соответствии с алгоритмом его функционирования
![]()
3. Определим передаточную функцию разомкнутой дискретной системы
![]()
4. Определим передаточную функцию системы по ошибке
5. Определим статическую ошибку

6. Определим кинетическую ошибку

Литература
1. Теория автоматического управления: Учебник для вузов. Ч1/Под ред. А.А. Воронова- М.: Высш. Шк.,1986.-367 с.
2. Теория автоматического управления: Учебник для вузов. Ч2/Под ред. А.А. Воронова- М.: Высш. Шк.,1986. -504 с.
3. Вероятностные методы в вычислительной технике. Под ред. А.Н. Лебедева и Е.А. Чернявского - М.: Высш. Шк.,1986. -312 с.
4. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. -712 с.
5. Васильев В.Г. Теорія сигналів і систем: Навч. посібник. – К.: ІСДО, 1995. –68 с.
6. Бойко Н.П., Стеклов В.К. Системы автоматического управления на базе микро-ЭВМ.- К.: Тэхника,1989. –182 с.
7. Автоматизированное проектирование систем автоматического управления./Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем