Синхронный двигатель
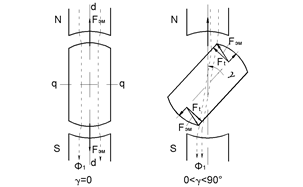
В том случае, когда g =0 (рис. 3.2, а), магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются. Реактивный вращающий момент Mр=0. Ротор находится в положении устойчивого равновесия. Если принудительно повернуть на угол g по часовой стрелке (рис. 3.2, б), то магнитные силовые линии изогнутся. Д
еформация магнитного поля вследствие упругих свойств силовых линий вызовет реактивный вращающий момент, стремящийся повернуть ротор против часовой стрелки. Очевидно, что при наличии внешнего момента Mн, ротор установится в такое положение, когда Mр= Mн.
В реальных реактивных СД обмотки статора создают вращающееся магнитное поле, а ротор увлекается реактивным моментом вслед за полем и вращается с угловой скоростью поля.
Важной характеристикой реактивного СД является удельный реактивный момент, который определяется как
![]() при g =0.
при g =0.
Величина удельного момента зависит от формы ротора и величины потока возбуждения в квадрате.
Реактивный СД не имеет собственного пускового момента, поэтому у таких двигателей применяется асинхронный метод пуска. В качестве пусковой обмотки на роторе служит либо обмотка типа «беличья клетка», либо алюминиевые части ротора. Когда скорость wд достигает величины, близкой к синхронной (~0,95wс), явнополюсный ротор взаимодействует с полем и втягивается в синхронизм. Ток коротко замкнутой обмотки падает до 0.
|
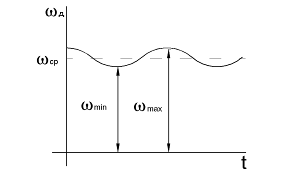
Причиной этого явления является нестабильность реактивного момента и момента нагрузки. Существуют внешние и внутренние (конструктивные) причины, приводящие к нестабильности моментов: эллиптичность вращающегося магнитного поля; неравномерность магнитной проводимости по различным осям двигателя; неточная балансировка ротора; тормозные моменты в подшипниках; колебания и несинусоидальность напряжения питания; неравномерность нагрузки на валу двигателя.
К уменьшению амплитуды качаний ротора приводят следующие факторы: увеличение удельного реактивного момента; улучшение технологии изготовления двигателей; использование электрического демпфирования. Так коротко замкнутая пусковая обмотка является одновременно и демпфирующей, т. к. при качаниях ротора относительно поля в ней наводятся токи, создающие момент, препятствующий качаниям ротора.
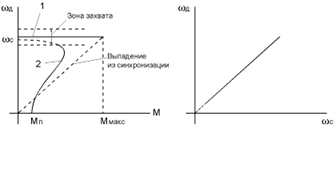
На рис. 3.4 показаны механическая (а) и регулировочная (б) характеристики реактивного СД. Механическая характеристика горизонтальна вплоть до величины максимального момента Mмакс, при котором двигатель выпадает из синхронизма и останавливается. На рис. 3.4 также показана механическая характеристика для пусковой обмотки (кривая 2).
|
|
|
Реактивные СД имеют много разновидностей, которые можно разделить на три основные группы: 1) реактивные СД с распределенными обмотками статора; 2) редукторные реактивные СД; 3) реактивные СД с сосредоточенными обмотками статора (будут рассмотрены в разделе «шаговые двигатели»).
Реактивные синхронные двигатели с распределенными обмотками статора. Статор таких двигателей принципиально ничем не отличается от статора обычных синхронных и асинхронных машин. Его задача – создать вращающееся магнитное поле.
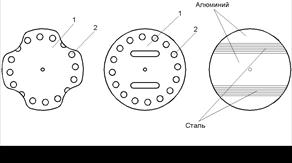
Ротор – явнополюсный. На рис. 3.5 изображены конструкции явнополюсных роторов. На рис. 3.5, а, б ротор выполнен из электротехнической стали. В нем находится «беличья клетка» для асинхронного пуска двигателя. Различная магнитная проводимость достигается за счет внешних (рис. 3.5, а) или внутренних пазов (рис. 3.5, б) в магнитном материале. В конструкции на рис. 3.5, в различная магнитная проводимость ротора достигается за счет выполнения его из двух разнородных по магнитным свойствам материалов.
Реактивные СД имеют невысокие энергетические показатели. Для рассматриваемой конструкции к.п.д. лежит в диапазоне от 5% до 40%.
Реактивный редукторный двигатель. Редукторные СД позволяют получить пониженную синхронную скорость вращения при питании от стандартной сети без механического редуктора.
|
|
Следовательно, угловая скорость ротора wд меньше угловой скорости поля статора wс в ![]() раз. Коэффициент редуцирования скорости
раз. Коэффициент редуцирования скорости ![]() . Для рассмотренного случая (рис. 3.6) Kр=4. Если zр=100 и zc=98, то Kр=50. Однако следует иметь ввиду, что число зубцов ограничивается технологическими соображениями.
. Для рассмотренного случая (рис. 3.6) Kр=4. Если zр=100 и zc=98, то Kр=50. Однако следует иметь ввиду, что число зубцов ограничивается технологическими соображениями.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода