Синхронный двигатель
Реактивные редукторные СД имеют недостатки, характерные для всех реактивных СД – малый вращающий момент, низкие энергетические показатели и большую массу.
Синхронные гистерезисные двигатели
В синхронных гистерезисных двигателях (СГД) вращающий момент возникает за счет гистерезиса при перемагничивании ротора. Статор СГД обычный, служит для создания вращающегося магнитного поля. Ротор вып
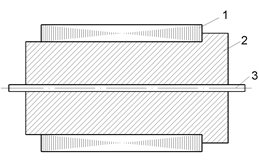
олнен из магнитотвердого материала. Используются материалы типа викалоя и ални с широкой петлей гистерезиса. Ротор выполняется сборным: на немагнитной или магнитомягкой втулке 2 напрессовано кольцо из магнитотвердого материала 1 (рис. 3.7). При ограниченной мощности возбуждения оптимальное по намагничиванию использование магнитотвердого материала кольца и наилучшие энергетические показатели достигаются при определенном соотношении между толщиной кольца и диаметром ротора.
|
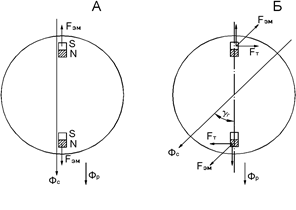
Для выяснения природы гистерезисного момента рассмотрим физические процессы, происходящие в роторе при асинхронном вращении, т.е. когда материал ротора непрерывно перемагничивается. На рис. 3.8, а магнитный поток статора Фс занимает положение А, а элементарные магнитики ротора ориентированы вдоль этого потока. Силы взаимодействия Fэм элементарных магнитиков с потоком статора Фс направлены вдоль этого потока и вращающего момента не создают. При перемещении потока статора в положение Б в том же направлении будут поворачиваться и элементарные магнитики (рис. 3.8, б). Однако вследствие явления гистерезисного запаздывания магнитики не повернутся на тот же угол, что и поток Ф1, а будут отставать от него на угол гистерезисного запаздывания gг.
|
| ||||||
| |||||||
Таким образом между направлением потока статора Ф1 и направлением намагниченности ротора образуется угол gг, который определяется коэрцитивной силой материала ротора. Силы взаимодействия Fэм будут иметь тангенциальные составляющие Ft, которые и создадут гистерезисный момент асинхронного режима Mг. Этот момент пропорционален модулю векторного произведения пространственных векторов магнитного потока ротора Фр, образованного элементарными магнитиками, и м.д.с. статора Fс, которые вращаются со скоростью поля со сдвигом на угол gг:
Mг=kFсФрsingг, (3.2)
где k – конструктивный коэффициент.
Пространственный угол gг не зависит от угловой скорости ротора и зависит только от коэрцитивной силы материала ротора, при которой начинается его перемагничивание (изменение направления поля элементарных магнитиков). Поэтому не зависит от угловой скорости ротора и вращающий гистерезисный момент Mг.
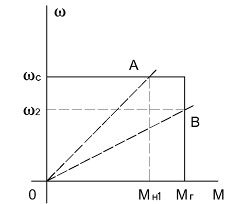
Механическая характеристика идеального гистерезисного двигателя приведена на рис. 3.9. Характеристика абсолютно жесткая, а пусковой момент равен моменту при синхронной угловой скорости (Mп=Mг).
|
Момент двигателя в синхронном режиме равен моменту нагрузки Mн, но не может превышать величины Mг. В зависимости от момента нагрузки Mн на валу двигателя изменяется угол отставания g оси поля ротора от оси поля статора. При Mн=0 (холостой ход) g=0. При Mн=Mг (максимальное значение момента) g=gг. При дальнейшем увеличении момента Mн начинается перемагничивание материала ротора, а вращающий момент остается постоянным, равным Mг. При Mн>Mг ротор двигателя выходит из синхронизма и останавливается.
В том случае, если момент нагрузки зависит от скорости вращения ротора Mн=f(w), то возможен как синхронный, так и асинхронный режим работы двигателя. Если момент нагрузки во всем диапазоне скоростей на превышает Mг (прямая 1 на рис. 3.9), то установится синхронная скорость wс, и вращающий момент будет соответствовать точке А на механической характеристике. Если изменение момента нагрузки идет по прямой 2, то установится асинхронная скорость w2<wс, а момент двигателя будет равен Mг. Следует отметить, что использование гистерезисного двигателя в асинхронном режиме неэкономично вследствие больших потерь на перемагничивание ротора, особенно при больших скольжениях.
Синхронные гистерезисные двигатели обладают рядом ценных качеств. Они развивают большой пусковой момент и способны входить в синхронизм плавно, без рывков благодаря постоянному значению пускового момента во время пуска при изменении w от 0 до wс. Потребляемый ток незначительно (на 20–30%) изменяется при изменении режима работы от короткого замыкания (w=0) до холостого хода (Mн=0, w=wс), что позволяет эффективно использовать гистерезисные двигатели в повторно-кратковременном режиме. Гистерезисные двигатели просты по конструкции и надежны в эксплуатации.
Энергетические показатели гистерезисных двигателей не высоки, т. к. магнитный поток ротора является вторичным, т.е. наведенным рабочим потоком статора, и режим работы такого двигателя соответствует режиму синхронной машины с недовозбуждением. К.п.д. гистерезисного двигателя можно повысить путем подмагничивания ротора с помощью кратковременного повышения значения магнитного потока статора за счет увеличения подводимого к нему напряжения.
Шаговые синхронные двигатели
Шаговые двигатели (ШД) преобразуют команду, заданную в виде импульсов, в фиксированное угловое или линейное перемещение. ШД являются дискретными преобразователями и широко используются при управлении с использованием цифровой вычислительной техники.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода