Автоматизация сновальной машины
Для оптимизации параметров регулятора влажности воспользуемся пакетом прикладных программ для построения систем управления Nonlinear Control Design (NCD) Blockset, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с Simulink, автоматически настраивает параметры моделируемых систем, основываясь на
определённых пользователем ограничениях на их временные характеристики. Типовой сеанс в среде Simulink с использованием возможностей и блоков NCD Blockset состоит из ряда стадий.
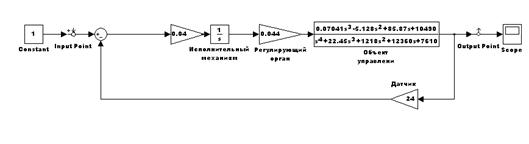
Начальной стадией является создание модели исследуемой системы из стандартных блоков. Затем вход блока NCD Outport соединяется с теми сигналами системы, на которые накладываются ограничения. Этими сигналами могут быть, например выходы системы, их среднеквадратические отклонения и т.д.
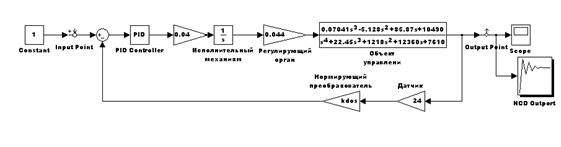
Рисунок 2.3.1 Схема САР для определения оптимальных параметров настройки ПИ- регулятора
Затем в режиме командной строки MATLAB задаются начальные значения параметров, подлежащих оптимизации.
>> kp=1
>> ki=1
>> kdos=1
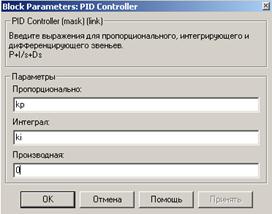
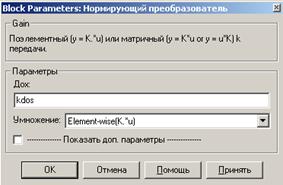
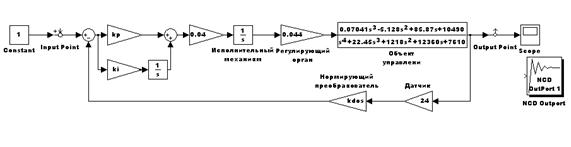
Двойным щелчком мыши на пиктограмме ПИ регулятор и нормирующего преобразователя раскрывается окно настроечных коэффициентов (см. рисунок 2.3.2 и 2.3.3). Где введем имена коэффициентов которые будем подвергать автоматической оптимизации.
|
Рисунок 2.3.2 Окно настроек PID регулятора |
|
Рисунок 2.3.3 Окно настроек нормирующего преобразовател |
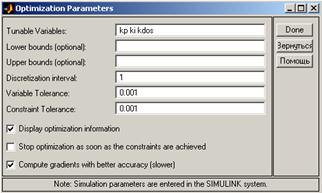
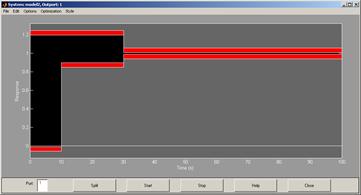
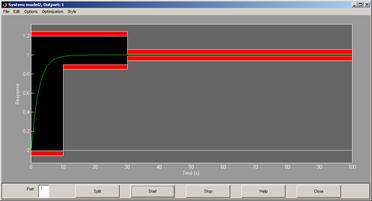
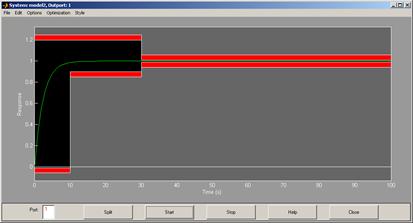
Двойным щелчком мыши на пиктограмме NCD Outport данный блок раскрывается. В меню блока NCD Outport задаётся интервал дискретизации (один или два процента от длительности процесса моделирования и указываются имена (идентификаторы) параметров системы, подлежащих оптимизации.
|
Рисунок 2.3.4 Окно настроек NCD Outport |
|
Рисунок 2.3.5 NCD Outport процесс оптимизации параметров регулятора |
По окончании работы NCD Outport в окне команд MATLAB можно получить оптимизированные значения коэффициентов ПИ - регулятора:
>> kp
kp = 42.6552
>> ki
ki = 0.1354
>> kdos
kdos = 0.4167
2.4 Анализ устойчивости и качества системы управления
Для построения переходной характеристики и логарифмических амплитудных и частотных характеристик с помощью LTI необходимо заменить блок PID контроллер на эквивалентную схему, т.к. блок PID не предназначен для работы в составе системы при линеаризации.
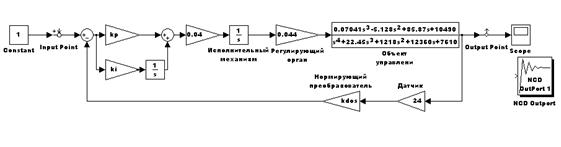
Рисунок 2.4.1 Схема САР натяжения нитей для снятия переходной характеристики
|
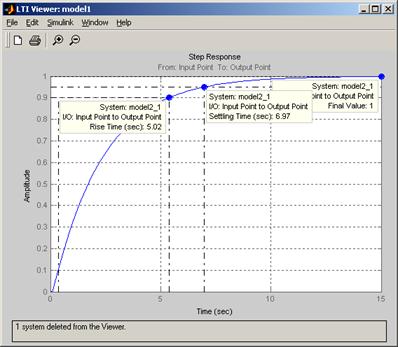
Рисунок 2.4.2 Переходная характеристика САР натяжения нитей с введенным и оптимизированным ПИ- регулятором |
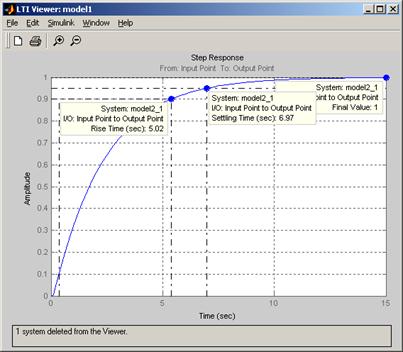
Из рисунка 2.4.2 видим:
1. Время нарастания – 5.02 с.;
2. Время регулирования – 6.97 с.;
3. Установившееся значение – 1;
4. Перерегулирование – нет.
Для получения логарифмических амплитудных и фазовых характеристик для определения запасов устойчивости и амплитуде и фазе необходимо разомкнуть систему.
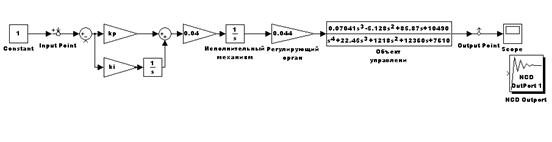
Рисунок 2.4.3 Схема разомкнутой САР для снятия логарифмических характеристик
|
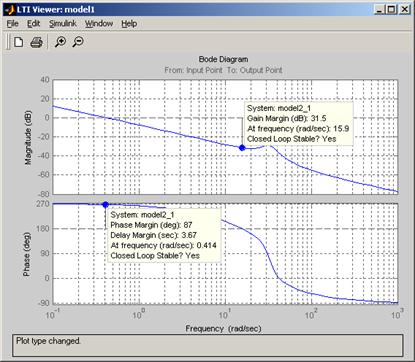
Рисунок 2.4.4 ЛАХ и ЛФХ системы автоматического регулирования натяжения нитей |
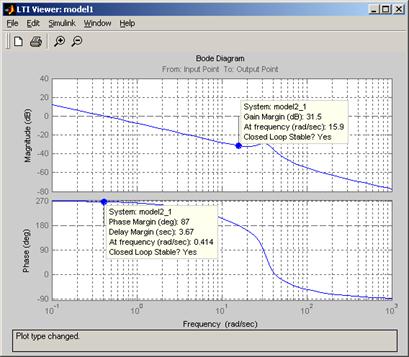
Из рисунка 2.4.4 видим:
1. Запас по амплитуде – 31.5 dB;
2. Запас по фазе – 87 градуса.
|
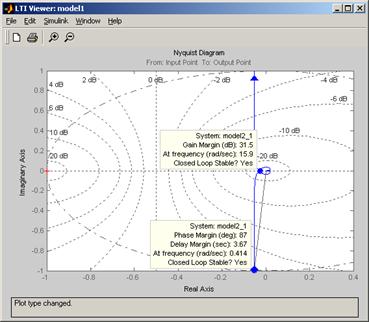
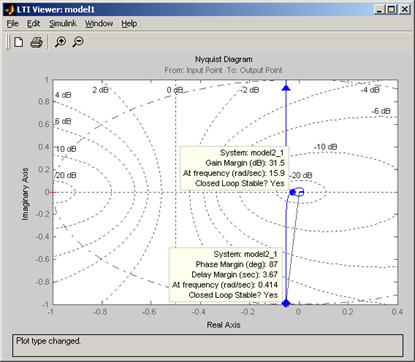
Рисунок 2.4.5 АФЧ системы автоматического регулирования натяжения нитей |
Заключение
В данной курсовой работе проведена идентификация намоточного устройства сновальной машины как объекта автоматического регулирования натяжения нитей основы. Проведена проверка на наблюдаемость и управляемость объекта управления. На основе анализа переходных характеристик объекта управления был выбран наиболее подходящий для данного переходного процесса ПИ – регулятор. Проведена оптимизация настроечных параметров этого регулятора с помощью MATLAB.
В результате введения в систему ПИ - регулятора были получены следующие параметры системы:
· Время переходного процесса 6.97 с.;
· Перерегулирование нет;
· Статическая ошибка – нет;
· Запас по фазе 87 градусов;
· Запас по амплитуде 31.5 dB.
Учитывая полученные значения параметров системы можно утверждать, что выполнены все поставленные в задании на курсовую работу требования.
Структурная схема АСР натяжения нитей
Динамический подбор коэффициентов ПИ регулятора с использованием блока NCD
Структурная схема АСР натяжения нитей для снятия переходной характеристики
Переходная характеристика АСР натяжения нитей
ЛАХ и ЛФХ АСР натяжения нитей
АФЧХ АСР натяжения нитей
Литература:
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. – 412 с.
2. Теория автоматического управления. Под. ред. Ю.М. Соломенцева. М.: Высшая школа, 2003. – 372 с.
3. Воронов А.А. «Основы теории автоматического регулирования и управления ». Уч. пособие для вузов. М.: Высш. Школа, 1977.-519стр
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды