Автоматизация сновальной машины
Ми = (В АВ А2В . Аn-1 В)
равнялся размерности вектора состояний п
rang Mu = n.
В пакете Control System Toolbox имеется функция ctrb, формирующая матрицу управляемости в пространстве состояний. Для того, чтобы воспользоваться этой функцией необходимо вычислить матрицы А, В, С, D с помощью команды:
>> [A,B,C,D]=ssdata(sn4s)
A =
-22.4548 -9.5169 -1.5082 -0.2903 -0.050
0
128.0000 0 0 0 0
0 64.0000 0 0 0
0 0 32.0000 0 0
0 0 0 8.0000 0
B =
0.5000
0
0
0
0
C =
0.1408 -0.0801 0.0210 -0.0674 0.1001
D =
0
Вычислим матрицу управляемости:
>> Mu=ctrb(A,B)
Mu =
0.0000 -0.0000 -0.0004 0.0155 0.1871
0 0.0001 -0.0014 -0.0457 1.9859
0 0 0.0041 -0.0920 -2.9243
0 0 0 0.1311 -2.9432
0 0 0 0 1.0486
Определим ранг матрицы управляемости:
>> n1=rank(Mu)
n1 =
5
Таким образом, для исследуемой модели объекта размерность вектора состояний, определяемая размером матриц А и В равна пяти и ранг матрицы управляемости Мu также равен пяти, что позволяет сделать вывод о том, что объект автоматизации является вполне управляемым, т.е. для него имеется такое управляющее воздействие u(t), которое способно перевести на интервале времени [to, tk] объект из любого начального состояния у (to) в произвольное заранее заданное конечное состояние y(tk).
При синтезе оптимальных систем с обратной связью сами управления получаются как функции от фазовых координат. В общем случае фазовые координаты являются абстрактными величинами и не могут быть исследованы. Поддается измерению (наблюдению) вектор у = (у1, .,yk)T , который обычно называют выходным вектором или выходной переменной, а его координаты - выходными величинами. Выходная переменная функционально связана с фазовыми координатами, и для реализации управления с обратной связью необходимо определить фазовые координаты по измеренным значениям выходной переменной. В связи с этим возникает проблема наблюдаемости, заключающаяся в установлении возможности состояния определения состояния объекта (фазового вектора) по измеренным значениям выходной переменной на некотором интервале.
Решение проблемы наблюдаемости основано на анализе уравнений переменных состояния и формулируется следующим образом: объект называется вполне наблюдаемым, если по реакции y(tk) на выходе объекта, на интервале времени [t0, tk] при заданном управляющем воздействии u(t) можно определить начальное состояние вектора переменных состояния x(t), являющихся фазовыми координатами объекта.
Критерием наблюдаемости линейных стационарных объектов является условие: для того, чтобы объект был вполне наблюдаемым, необходимо и достаточно, чтобы ранг матрицы наблюдаемости
My = (СТАТСТ (АТ)2СТ . (AT)n-1C)
равнялся размерности вектора состояния
п = rang MY.
Определим матрицу наблюдаемости:
>> My=obsv(A,C)
My =
0.0000 -0.0000 0.0000 -0.0000 0.0000
-0.0001 0.0000 -0.0000 0.0000 -0.0000
0.0030 -0.0002 0.0004 0.0000 0.0000
-0.0984 -0.0002 -0.0033 -0.0008 -0.0002
2.1856 0.7238 0.1221 0.0274 0.0049
Определим ранг матрицы наблюдаемости:
>> n2=rank(My)
n2 =
5
Таким образом, для исследуемой модели объекта размерность вектора состояний, определяемая размером матриц А и С равна пяти и ранг матрицы наблюдаемости MY также равен пяти, что позволяет сделать вывод о том, что объект автоматизации является вполне наблюдаемым, т.е. для него всегда можно определить по, значениям выходной величины y(t) вектор переменных состояния, необходимый для синтеза системы управления.
2.2 Обоснование выбора типа регулятора
Для того, чтобы правильно выбрать необходимый тип вносимого в систему регулятора, исследуем переходный процесс объекта управления на основании передаточной функции W(p) ТОУ полученной в предыдущем разделе. Построим функциональную схему в SIMULINK и с помощью LTI получим переходную характеристику объекта управления:
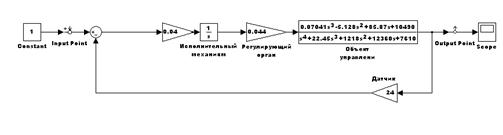
Рисунок 2.2.1 Схема моделирования САР в SIMULINK
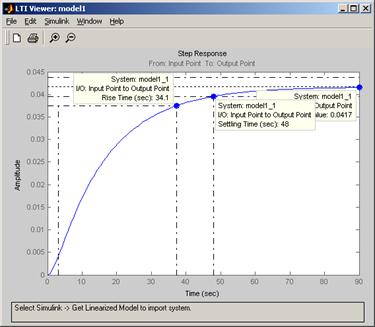
По виду переходной характеристики можно сказать, что имеющиеся показатели точности и качества нас не удовлетворяют:
· время регулирования составляет 48 с.
· статическая ошибка составляет более 99 %.
|
Рисунок 2.2.2 Переходная характеристика ТОУ |
Для обеспечения заданных показателей качества и точности переходного процесса, а также выполнения требований по запасам устойчивости необходимо введение в систему линейного регулятора.
Очевидно, что статическую ошибку данной системы не получится устранить введением только регулятора, в связи с очень большим коэффициентом передачи датчика обратной связи. Необходимо, ввести последовательно с датчиком обратной связи звено, которое обеспечивало бы, коэффициент передачи по цепи обратной связи равный 1, т.е. установить нормирующий преобразователь с передаточной функцией:
![]() , где
, где ![]() .
.
Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций:
И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τ/Т<0.1);
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τ/Т<0.1;
ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τ/Т<1;
ПИД – регуляторы при условии τ/Т<1 и малой колебательности исходных процессов.
Исходя из выше изложенных рекомендаций и учитывая применительно к нашей системе τ/Т=0.74, становится очевидно, что применение П- или И- регулятора с данным объектом не рекомендуется.
ПИ и ПИД регуляторы могут быть вполне применены. Исходя из соображений простоты конструкции, в данной курсовой работе сначала рассмотрим возможность использования в данной АСР ПИ- регулятора, в случае если с ним система не будет выполнять заданные показатели качества, точности и устойчивости, тогда будет рассмотрена возможность в применении регулятора с ПИД законом регулирования.
2.3 Оптимизация параметров настройки ПИ - регулятора
Информационные технологии коренным образом изменили порядок решения математических задач. Теперь решение задач и выполнение математических преобразований выполняются с помощью специальных программ. Одной из математических систем является MATLAB (MATrix LABoratory – матричная лаборатория компании MathSoft), которая в основном направлена для численного моделирования систем. В основу создания системы положен принцип расширяемости, где пользователь может создавать практически неограниченное число собственных функций. На этапе разработки структурной (укрупнённой) схемы применяется программа Simulink, представляющая собой “конструктор”, с помощью которого из стандартных “кубиков” строится структурная схема.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды