Защита от средств слежения за автомобилями
Для зональных диспетчерских систем идеальной может считаться получение данных о местоположении подвижного объекта до одного раза в минуту. Системы дистанционного сопровождения требуют большей частоты обновления информации.
Конкретные реализации AVL-систем часто включают в свой состав технические средства, обеспечивающие несколько способов определения местоположения.
Методы определени
я местоположения, используемые в AVL-системах, по классификации можно разбить на три основных категории:
Ø методы приближения (зоновые);
Ø методы навигационного счисления;
Ø методы определения местоположения по радиочастоте.[1,2]
Примерная классификация методов и на их основе систем AVL приведена в Приложении А.
1.2 Системы на базе методов приближения
Для определения местоположения подвижного объекта на территории города создается сеть контрольных зон. Это достигается с помощью использования достаточно большого количества дорожных указателей или контрольных пунктов (КП1 — КПn), точное местоположение которых в системе известно (рис. 1.2). Местоположение транспортного средства определяется по мере прохождения последним зон действия этих пунктов. Индивидуальный код каждого контрольного пункта передается при этом по радиоканалу в бортовую аппаратуру транспортного средства, которая, в свою очередь, через подсистему передачи данных передает эту информацию, а также свой идентификационный код в подсистему управления и обработки данных. Таким образом, реализуется метод прямого приближения. Данные о местоположении транспортного средства выводятся на экран мониторов диспетчерского пункта (возможно отображение на карте местности). Достоверность получаемой информации во многом зависит от количества и расположения контрольных пунктов.
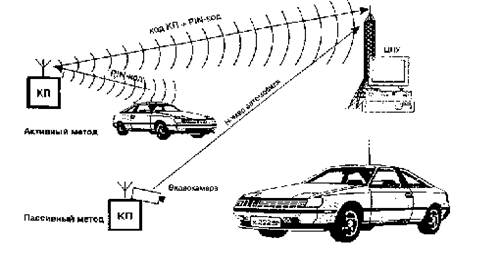
Рисунок 1.3 – Метод инверсного приближения
Однако на практике чаще используется инверсный метод приближения (рис. 1.3): обнаружение и идентификация транспортных средств осуществляется с помощью установленных на них активных, пассивных или полуактивных маломощных радиомаяков, передающих на приемник контрольного пункта свой индивидуальный код, или же с помощью оптической аппаратуры считывания и распознавания характерных признаков объекта, например, автомобильных номеров. Информация от контрольных пунктов передается далее в подсистему управления и обработки данных.
Очевидно, что для зоновых систем точность местоопределения и периодичность обновления данных напрямую зависит от плотности расположения контрольных пунктов на территории действия системы. Методы приближения требуют развитой инфраструктуры связи для организации подсистемы передачи данных с большого числа таких пунктов в центр управления и контроля, а в случае использования оптических методов считывания — требуют и сложной аппаратуры, используемой на всех контрольных пунктах, и поэтому весьма дороги при построении систем, охватывающих большие территории. В то же время, инверсные методы приближения позволяют минимизировать объем бортовой аппаратуры — радиомаяка, либо вовсе обойтись без устанавливаемой на автомашину аппаратуры. Основное применение данных систем — комплексное обеспечение охраны автомашин, обеспечение поиска автомашин при угоне. Примером подобной системы является система КОРЗ, обеспечивающая фиксацию приближения угнанной оборудованной автомашины к посту—пикету ГИБДД. Во многих зарубежных странах зоновые системы функционируют уже длительное время, как для нужд диспетчеризации общественного транспорта, движущегося по постоянным маршрутам, так и для нужд правоохранительных органов.[1]
1.3 Методы местоопределения по радиочастоте
Местоположение транспортного средства определяется путем измерения разности расстояний транспортного средства от трех или более относительных позиций.
Данную группу методов можно условно разбить на две подгруппы:
Ø радиопеленгация (обобщенно), когда абсолютное или относительное местоположение подвижного объекта определяется при приеме излучаемого им радиосигнала сетью стационарных или мобильных приемных пунктов;
Ø вычисление координат по результатам приема специальных радиосигналов на борту подвижного объекта (методы прямой или инверсной радионавигации).[1]
1.3.1 Методы радиопеленгации
С помощью распределенной по территории города сети пеленгаторов или с помощью мобильных средств пеленгации возможно отслеживание местоположения объектов, оборудованных радиопередатчиками-маяками.
На практике метод пеленгации, как наиболее дешевый в начальные годы становления систем спутниковой навигации (когда стоимость спутниковых приемников измерялась тысячами долларов), был опробован полицейскими и пожарными службами США и Канады. Результаты опытной эксплуатации системы показали, что ома может очень хорошо использоваться на открытой местности. Однако данная система имеет большие погрешности в условиях плотной городской застройки. Кроме того, стоимость инфраструктуры, необходимой для охвата значительной площади, весьма велика. В настоящее время этот метод используется очень редко.
Примером AVL-системы, основанной на методах радиопеленгации, можно считать систему ГИПС (новое название — СКИФ). Принцип работы системы заключается в следующем. Прием сигнала, излучаемого малогабаритным радиомаяком на подвижном объекте, осуществляется сетью стационарных радиоприемных центров, и по полученным данным производится с помощью математических операций определение местоположения автомашины с наибольшей вероятностью. Применение широкополосных сигналов с базой 103 –108 обеспечивает частоту обновления информации один раз в секунду в системе из 5000 объектов при высокой помехозащищенности. Точность местоопределения зависит от плотности размещения стационарной радиоприемной сети на территории города и может составлять единицы метров в режиме непрерывного слежения и корректировки данных по электронной карте.
Подобную систему с применением пейджеров двухсторонней связи и сети приемопередающих станций предлагает фирма «МегаПейдж». Широкополосный передатчик, установленный на автомашине, включается по сигналу стандартного пейджингового приемника либо по сигналу системы противоугонной сигнализации. Определение местоположения передатчика осуществляется с помощью сети базовых станций пейджинговой системы.
Примером системы на базе мобильных пеленгаторов является хорошо известная по телевизионным шоу-программам канала НТВ — система LoJack. Пеленгаторами данной системы оборудованы автомашины специального батальона дорожно-постовой службы ГИБДД и посты-пикеты ГИБДД на выезде из Москвы и ряда других городов.[1]
1.3.2 Методы радионавигации
Космическая радионавигация воплотила в себе новейшие достижения компьютерных и телекоммуникационных технологий. Симбиоз спутниковой системы позиционирования, современной радиосвязи и электронной картографии позволяет определять местоположение и скорость транспортного средства, вычислять расстояния, прокладывать маршруты и отслеживать их соблюдение, получать справки о картографических объектах. Сегодня работают две системы: американская Navstar и отечественная ГЛОНАСС. Использование обеих систем позволяет более точно определять координаты и повышает надежность функционирования.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем