Основы метрологии, взаимозаменяемости и стандартизации
|
|
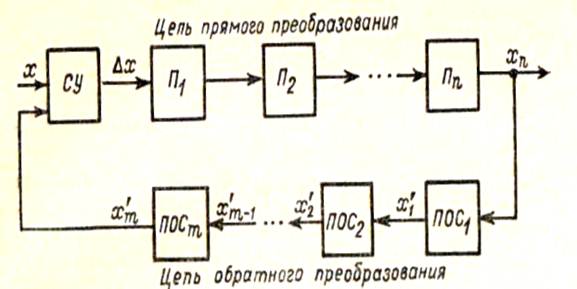
Рис. 1.3. Структурная схема средства измерений уравновешивающего преобразования
Для цепи обратного преобразования (обратной связи)
xm` = xnβ1 β2 …. βm = xnβ (1
.5)
где β— коэффициент преобразования цепи обратного преобразования;
β1 , β2, , βm— коэффициенты преобразования звеньев обратной связи.
На входе цепи прямого преобразования в узле СУ происходит сравнение (компенсация) входного сигнала х и выходного сигнала цепи обратного преобразования х'm и при этом на выходе СУ получается разностный сигнал Δх = х — х'm.
При подаче на вход сигнала х выходной сигнал хn, а следовательно, и х'm, будут возрастать до тех пор, пока х и х'т не станут равны. При этом по значению хn можно судить об измеряемой величине х.
Средства измерений, имеющие такую структурную схему, могут работать как с полной, так и с неполной компенсацией.
При полной компенсации в установившемся режиме
Δх = х — хт = 0. (1.6)
Это возможно в тех устройствах, у которых в цепи прямого преобразования предусмотрено интегрирующее звено с характеристикой преобразования хi= ![]() (xi-1)dt. Примером такого звена является электродвигатель, для которого угол поворота вала определяется приложенным напряжением и временем. В этом случае, учитывая (1.5) и (1.6), получим
(xi-1)dt. Примером такого звена является электродвигатель, для которого угол поворота вала определяется приложенным напряжением и временем. В этом случае, учитывая (1.5) и (1.6), получим
хn = х/(β1 β2 . βm)=х/ β. (1.7)
Таким образом, в момент компенсации сигнал на выходе средства измерений пропорционален входному сигналу и не зависит от коэффициента преобразования цепи прямого преобразования.
Чувствительность (коэффициент преобразования)
S=![]() =
= ![]() =
= ![]() (1.8)
(1.8)
Мультипликативная относительная погрешность, обусловленная нестабильностью коэффициентов преобразования звеньев, при достаточно малых изменениях этих коэффициентов
Как видно из этого выражения, относительная мультипликативная погрешность обусловлена только относительным изменением коэффициента преобразования цепи обратного преобразования.
Аддитивная погрешность в средствах измерений с полной компенсацией практически обусловливается порогом чувствительности звеньев, расположенных до интегрирующего звена, и порогом чувствительности самого интегрирующего звена.
Под порогом чувствительности звена понимается то наименьшее изменение входного сигнала, которое способно вызвать появление сигнала на выходе звена. Порог чувствительности имеют, например, электродвигатели, часто применяемые в рассматриваемых устройствах. Для реальных звеньев график характеристики преобразования может иметь вид, показанный на рис. 1.4, где ± Δхi-1 — порог чувствительности.
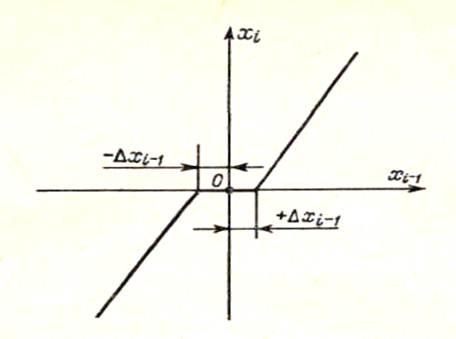
Рис. 1.4. Характеристика преобразования звена с порогом чувствительности
При наличии порога чувствительности средства измерений состояние компенсации наступает при х — х'т = Δх. Таким образом, изменение входного сигнала в пределах ±Δx не вызывает изменения выходного сигнала, т. е. появляется абсолютная аддитивная погрешность, значение которой может быть в пределах ± Δх.
При неполной компенсации в средствах измерений интегрирующего звена нет и обычно выполняется условие (1.5), а также
xn = kΔx, (1.9)
где k = k1 k2 .kn — коэффициент преобразования цепи прямого преобразования. В этом случае установившийся режим наступает при некоторой разности
Δх = х — х'т. (1.10)
Зависимость между выходным и входным сигналами, находимая путем решения уравнений (1.5), (1.9) и (1.10),
xn = kx/(l+kβ). (1.11)
Как видно из выражения (1.11), при установившемся режиме выходной сигнал пропорционален входному и зависит от коэффициентов преобразования цепи как обратного, так и прямого преобразования.
Если выполняется условие kβ»l, то уравнение (1.11) переходит в (1.7) и при этом нестабильность коэффициента преобразования цепи прямого преобразования не влияет на работу устройства. Практически, чем выше kβ, тем меньше влияние k. Предел увеличения kβ обусловлен динамической устойчивостью средства измерений.
Чувствительность (коэффициент преобразования) средства измерений с неполной компенсацией
S=![]() =
=![]() (1.12)
(1.12)
Мультипликативная погрешность, обусловленная изменением коэффициентов преобразования звеньев при достаточно малых изменениях этих коэффициентов.
Следовательно, при kβ>>1 (что обычно имеет место) составляющая, обусловленная изменением коэффициента β, целиком входит в результирующую погрешность, а составляющая, обусловленная изменением коэффициента k, входит в результирующую погрешность ослабленной в kβ раз.
Нелинейность характеристики преобразования цепи прямого преобразования можно рассматривать как результат влияния изменения коэффициента преобразования k относительно некоторого начального значения при х = 0. Полученные уравнения показывают, что нелинейность характеристики преобразования уменьшается действием отрицательной обратной связи в kβ раз.
Аддитивная погрешность может быть найдена путем введения в структурную схему дополнительных сигналов Δxo1, Δхо2,- , Δxon, Δx`o1, Δх`o2, ., Δх`oт, равных смещениям характеристик преобразования соответствующих звеньев.
Применяя методику, рассмотренную выше, получим абсолютную аддитивную погрешнось, равную погрешности
Δxo=[Δxo1/k1 + Δxo1/(k1k2) +…. + Δxo1/(k1 k2 .kn)]— (β2β3….βmΔx`o1 + β3β4… βmΔx`o2 + …+ Δx`om). (1.13)
Следует отметить, что средства измерений могут иметь комбинированные структурные схемы, когда часть цепи преобразования охвачена обратной связью.
Вид структурной схемы средства измерений влияет не только на рассмотренные характеристики (чувствительность, погрешность), но также на входные и выходные сопротивления, динамические свойства и др.
2. Время-импульсный цифровой вольтметр
Вэтих вольтметрах (рис. 2, а и б) измеряемое напряжение Ux предварительно преобразуется во временной интервал tx путем сравнения Ux с линейно-изменяющимся напряжением Uk.
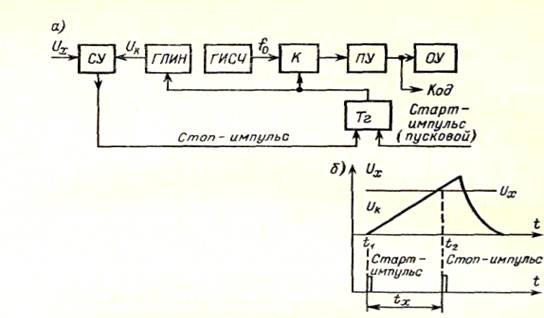
Рис. 2. Схема (а) и диаграммы напряжений (б) время-импульсного вольтметра
При запуске прибора старт-импульсом в момент t1 срабатывает триггер Тг, который открывает ключ К и запускает генератор линейно-изменяющегося напряжения ГЛИН. Напряжение UK на выходе генератора ГЛИН начинает изменяться по линейному закону, и на вход ПУ подаются квантующие импульсы. В момент t2 при UK=UX сравнивающее устройство СУ стоп-импульсом через триггер и ключ прекращает подачу импульсов в ПУ. Таким образом, за время tx=t2 — t1 = Ux/k (где k — коэффициент, характеризующий скорость изменения напряжения Uк) на вход ПУ пройдет число импульсов
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Схема процесса автоматизированного проектирования РЭС. Структура и классификация проектных задач
- Многовибраторная антенная решетка с рефлектором 16х4 эт
- Разработка системы управления многосвязных систем автоматического регулирования исполнительного уровня
- Вопросы устойчивости и общие сведения об автогенераторах
- Исследование канальных протоколов с обратной связью
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем