Решения задачи планирования производства симплекс методом
Описание метода решения задачи.
Процедура решения ЗЛП начинается с приведения ее к канонической форме, то есть к стандартной форме задания, ориентированной на разработанный именно для этой формы метод решения. Задача линейного программирования в канонической форме имеет смысл при условии n>m. В этом случае полностью описывается область допустимых решений (ОДР) ЗЛП, геометрически являющую
ся выпуклым многогранником в евклидовом пространстве Rn[1]. Выпуклая фигура, как известно, характеризуется тем свойством, что, если две точки X1 и X2 принадлежат этой фигуре, то и весь отрезок X1X2 принадлежит ей. Кроме того, доказано, что оптимальное решение ЗЛП всегда лежит на границе ОДР. Поэтому справедлив вывод о том, что, по крайней мере, одна из угловых (опорных) точек выпуклого многогранника ОДР является точкой оптимума. Для того, чтобы определить координаты опорной точки, все множество переменных X={xj}, j=![]() необходимо разделить на два подмножества
необходимо разделить на два подмножества
![]() :
:
подмножество базисных переменных ![]() , при этом число m базисных переменных равно числу уравнений (ограничивается) при условии, что уравнения являются линейно-независимыми; подмножество
, при этом число m базисных переменных равно числу уравнений (ограничивается) при условии, что уравнения являются линейно-независимыми; подмножество ![]() остальных n-m свободных (внебазисных) переменных {xj}, j
остальных n-m свободных (внебазисных) переменных {xj}, j![]() Б[1].
Б[1].
Количество возможных вариантов разделения переменных на базисные и свободные (число базисов) равно ![]() .
.
Наиболее очевидный метод решения ЗЛП состоит в том, чтобы для каждого из ![]() базисов найти координаты соответствующих опорных точек, выделить из них точки, принадлежащие ОДР, а затем из них, в свою очередь, выбрать ту, координаты которой максимизируют целевую функцию. В отличие от этого метода, реализующего, по сути, идею полного перебора опорных точек ОДР, известен более эффективный так называемый симплекс-метод решения ЗЛП.
базисов найти координаты соответствующих опорных точек, выделить из них точки, принадлежащие ОДР, а затем из них, в свою очередь, выбрать ту, координаты которой максимизируют целевую функцию. В отличие от этого метода, реализующего, по сути, идею полного перебора опорных точек ОДР, известен более эффективный так называемый симплекс-метод решения ЗЛП.
В основе симплекс-метода лежит подход, включающий:
выбор опорной точки, принадлежащей ОДР (выбор начального допустимого базиса);
проверку опорной точки на оптимальность;
выбор нового базиса, позволяющего минимизировать число опорных точек на траектории в случае невыполнения условий оптимальности.
Приведение исходной задачи к каноническому виду.
Имеем исходную ЗЛП:
{60x1+50x2+37x3+45x4+56x5}![]() max.
max.
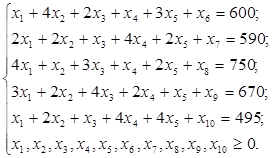
x1+4x2+2x3+x4+3x5![]() 600;
600;
2x1+2x2+x3+4x4+2x5![]() 590;
590;
4x1+x2+3x3+x4+2x5![]() 750;(4)
750;(4)
3x1+2x2+4x3+2x4+x5![]() 670;
670;
x1+2x2+x3+4x4+4x5![]() 495;
495;
x1, x2, x3, x4, x5 ![]() 0.
0.
Приведем ЗЛП к канонической форме. Приведение системы ограничений, заданных в форме неравенств, к канонической форме равенств осуществляется посредством соответствующего увеличения размерности вектора X=(x1, x2, x3, x4, x5) с учетом обязательной неотрицательности всех его составляющих.
Таким образом, ЗЛП в канонической форме имеет вид:
max {60x1+50x2+37x3+45x4+56x5};
 (5)
(5)
Поиск допустимого базиса.
Заполнение симплекс-таблицы.
ЗЛП в канонической форме можно записать в матричном виде:
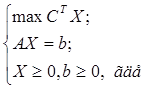 (6)
(6)
b=(600, 590, 750, 670, 495)T,
X=(x1, x2, x3, x4, x5, x6, x7, x8, x9, x10)T,
C=(60,50,37,45,56,0,0,0,0,0),
A=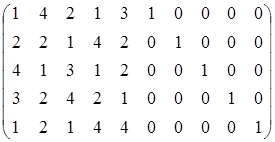 .
.
Поиск допустимого базиса начинается с анализа столбцов матрицы A=(A1, A2,…, A10), используемой в записи ограничения (6) канонической формы ЗЛП. В качестве базисных следует выбирать такие 5 переменных, которым соответствует набор столбцов, позволяющих составить единичную матрицу P=(Aj1, Aj2, Aj3, Aj4, Aj5).
Если ОДР исходной ЗЛП задана в форме неравенств типа ![]() (как в нашем случае), то начальный базис может быть сформирован из дополнительных переменных x6, x7, x8, x9, x10, вводимых в систему ограничений с целью приведения ее к канонической форме равенств. В этом случае матрица P будет единичной.
(как в нашем случае), то начальный базис может быть сформирован из дополнительных переменных x6, x7, x8, x9, x10, вводимых в систему ограничений с целью приведения ее к канонической форме равенств. В этом случае матрица P будет единичной.
Таким образом, выберем в качестве начального базиса XБО=(x6, x7, x8, x9, x10)T, так как столбцы A6, A7, A8, A9, A10 матрицы A образуют единичную матрицу.
Теперь перейдем к заполнению симплекс-таблицы. Пусть ЗЛП сформулирована в канонической форме (5). Мы выбрали базисные переменные x6, x7, x8, x9, x10. Разрешим систему неравенств в (5) относительно базисных переменных.
Система ограничений в форме Такера примет вид:
x6=600-(x1+4x2+2x3+x4+3x5);
x7=590-(2x1+2x2+x3+4x4+2x5);
x8=750-(4x1+x2+3x3+x4+2x5);(7)
x9=670-(3x1+2x2+4x3+2x4+x5);
x10=495-(x1+2x2+x3+4x4+4x5);
Целевую функцию можно представить в виде:
f(x)=f0-(-60x1-50x2-37x3-45x4-56x5), где f0=0.
Симплекс-таблица выглядит следующим образом:
Таблица 1. Исходная симплекс таблица в общем виде
|
b |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
x7 |
x8 |
x9 |
x10 | |
|
x6 |
b6 |
a61 |
a62 |
a63 |
a64 |
a65 |
a66 |
a67 |
a68 |
a69 |
a610 |
|
x7 |
b7 |
a71 |
a71 |
a71 |
a71 |
a71 |
a71 |
a71 |
a71 |
a71 |
a710 |
|
x8 |
b8 |
a81 |
a82 |
a83 |
a84 |
a85 |
a86 |
a87 |
a88 |
a89 |
a810 |
|
x9 |
b9 |
a91 |
a92 |
a93 |
a94 |
a95 |
a96 |
a97 |
a98 |
a99 |
a910 |
|
x10 |
b10 |
a101 |
a102 |
a103 |
a104 |
a105 |
a106 |
a107 |
a108 |
a109 |
a1010 |
|
f(x) |
f0 |
c1 |
c2 |
c3 |
c4 |
c5 |
c6 |
c7 |
c8 |
c9 |
c10 |
Другие рефераты на тему «Экономико-математическое моделирование»:
- Теоретические основы математических и инструментальных методов экономики
- Основные направления реформирования социально-экономической статистики России
- Нахождение минимальных затрат при распределении товаров среди магазинов методами решения транспортной задачи
- Прогнозирование и регулирование развития производственной инфраструктуры
- Примеры решения эконометрических заданий
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели