Проектирование системы автоматического управления
Содержание.
1.Анализ системы .4
1.1 Исследование устойчивости .4
1.2 Построение АЧХ, ФЧХ, АФЧХ 7
1.3 Численные методы интегрирования 9
1.4 Анализ системы с использованием спектрального метода (базис Лягерра) 13
2. Синтез регулятора .17
3. Синтез робастного регулятора матричным методом .19
Приложение 22
Литература 33
ight=27 src="images/referats/8259/image001.png">
![]()
![]()
![]()
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]() у(t) x(t)
у(t) x(t)
![]()
![]() - -
- -
Рис. 1. Структурная схема заданной САУ
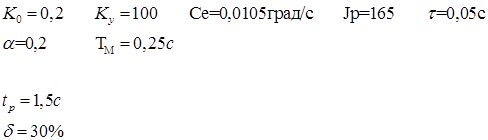
Данные:
![]()
![]()
![]()
1. Анализ системы.
1.1 Исследование устойчивости.
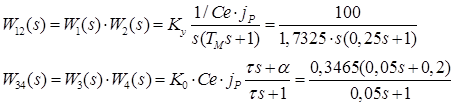
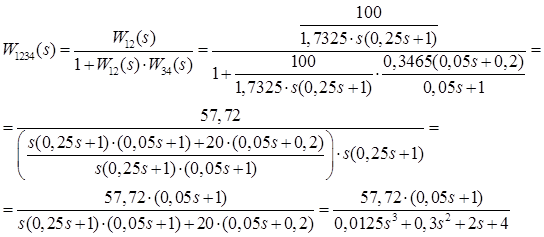
 - передаточная функция
- передаточная функция
![]() - характеристический полином
- характеристический полином
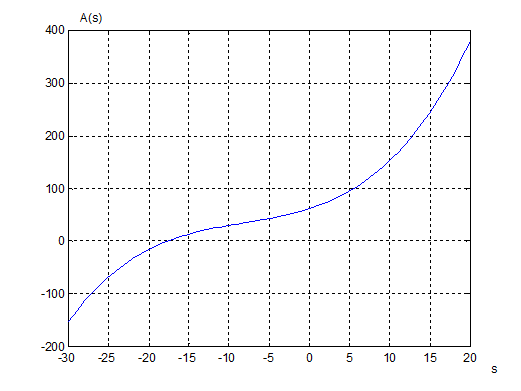
Рис. 2. Характеристический полином.
![]() имеет 1 действительный корень и 2 комплексных.
имеет 1 действительный корень и 2 комплексных.
![]()
Уравнение решается методом Стеффенсена.
Метод Стеффенсена.
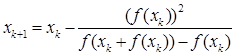
Начальное приближение ![]() для нахождения действительного корня.
для нахождения действительного корня.
![]()
На рис.3. изображено значение корня от итерации.
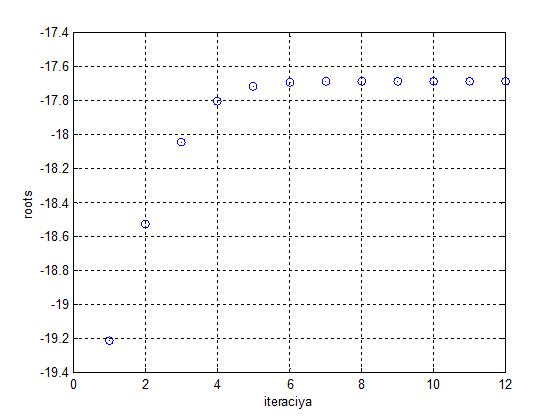
Рис.3. Динамика изменения корня в зависимости от итерации.

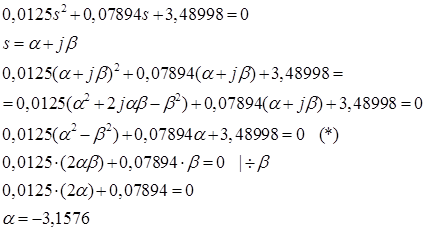
Подставим ![]() в (*).
в (*).
Корни характеристического уравнения
Полюса передаточной функции находятся в левой полуплоскости. Система устойчива. Система будет колебательной т.к. корни имеют мнимую часть ![]()
Построение АЧХ, ФЧХ, АФЧХ.
Годограф АФЧХ.
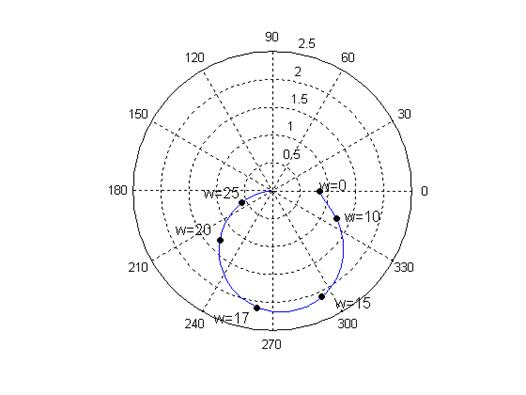
Рис.4. АФЧХ
График АЧХ

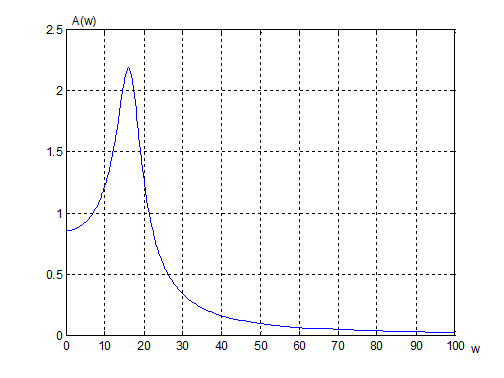
Рис.5. АЧХ
![]()
![]()
![]()

График ФЧХ
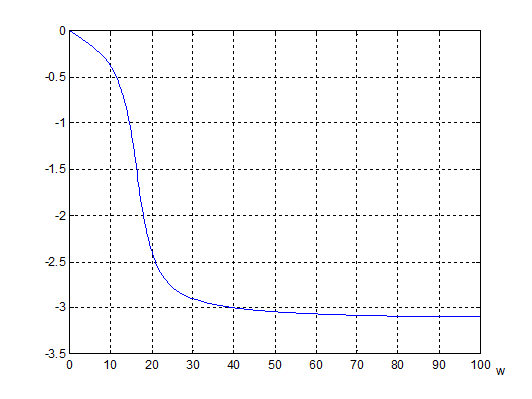
Рис.6. ФЧХ

1.2 Построение переходного процесса численным методом.
Для решения дифференциального уравнения используется многошаговый, неявный метод второго порядка, интерполяционная схема Адамса.
В неявных методах используется информация о возможном будущем значении решения в точке п+1. Это несколько повышает точность получаемых результатов по сравнению с явными методами.
![]()
Погрешность ![]()
![]()
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды