Расчет и проектирование автоматической системы технологического оборудования для обработки оси
При обслуживании металлорежущих станков промышленные роботы (ПР) выполняют следующие вспомогательные операции: установку заготовок в рабочей зоне станка и снятие обработанной детали с укладкой ее на конвейер, в ориентирующий магазин и т. п.; контроль размеров заготовок и обработанных деталей; очистку базовых поверхностей деталей, заготовок и фиксирующих приспособлений станка от грязи и стружки;
проверку правильности базирования и фиксации заготовок в зажимных приспособлениях станка; смену захватов, а также режущего и вспомогательного инструмента. ПР может осуществлять поиск, опознавание детали и перебазирование ее в процессе обработки. При обслуживании группы станков ПР обеспечивает межстаночное транспортирование деталей.
Типовым примером одностаночного РТК с встроенным ПР являются комплексы на базе ПР мод. M10П.62.01 и его модификаций. ПР может быть закреплен в различных положениях в зависимости от схемы загрузки станка и оснащен двухместным захватом.
Как правило, указанные РТК содержат тактовые накопители, предназначенные для транспортирования деталей в зону работы ПР. Заготовки могут располагаться либо непосредственно на накопителе, либо на спутниках, закрепленных на накопителе. Возможна также работа ПР и со стационарной многопозиционной тарой.
Планировка РТК с ПР мод. М10П.62.01 показана на рис. 3.1.РТК укомплектован тактовым столом 5, на котором устанавливается запас заготовок, достаточный для двух- восьмичасовой работы комплекса. В состав РТК входит также система 3 управления станком.
Тактовый стол подает заготовку на фиксированную позицию, на которой ее снимает рука ПР 2 и устанавливает в рабочую зону станка 1. После обработки готовая деталь снимается и устанавливается роботом в ту же позицию тактового стола. Затем система управления роботом формирует сигнал для перемещения тактового стола на один шаг: готовая деталь перемещается на другую позицию, а на ее место поступает новая заготовка.
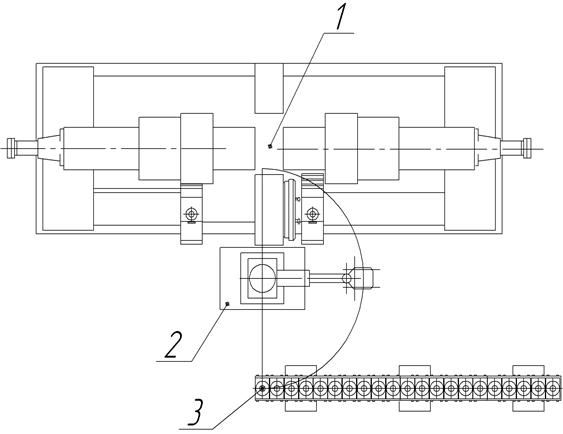
Рисунок 3.1 – Планировка РТК с ПР
Рисунок 3.1 – Пример РТК для обработки деталей типа вал
4 РАСЧЕТ ЭКОНОМИЧЕСКИХ ПОКАЗАТЕЛЕЙ
Показателем экономической эффективности являются неполные приведенные затраты.
Неполные приведенные затраты (с учетом принятых допущений):
![]() =
=![]()
где К – стоимость технологического оборудования;
З – заработная плата (считаем постоянной).
Составим таблицу 4.1 и 4.2, в которой укажем стоимость каждой единицы оборудования.
Таблица 4.1 – Стоимость оборудования для первого варианта
|
№ обор. |
Наименование оборудования |
Стоимость оборудования |
|
1 |
Станок автомат |
15000 |
|
2 |
Станок автомат |
15000 |
|
3 |
Станок автомат |
15000 |
|
4 |
Станок автомат |
15000 |
|
5 |
Станок автомат |
15000 |
|
6 |
Станок автомат |
15000 |
|
7 |
Станок автомат |
15000 |
|
8 |
Агрегатный станок |
10000 |
|
115000 | ||
Таблица 4.2 – Стоимость оборудования для второго варианта
|
№ обор. |
Наименование оборудования |
Стоимость оборудования |
|
1 |
Станок автомат |
15000 |
|
2 |
Станок автомат |
15000 |
|
3 |
Станок автомат |
15000 |
|
4 |
Станок автомат |
15000 |
|
5 |
Станок автомат |
15000 |
|
6 |
Агрегатный станок |
10000 |
|
85000 | ||
Рассмотрев приведенные варианты, окончательно выбираем тот, что отличается наиболее низкими значениями приведенных затрат.
ВЫВОД
В данной курсовой работе рассматривался процесс проектирования автоматической линии технологического оборудования.
Поставленная цель работы - спроектировать оптимальную структурно-компоновочную схему автоматической линии для условий серийного производства детали типа «Ось» - была полностью достигнута, при этом было выполнено основное требование к проектируемой линии: обеспечена требуемая производительность при наилучших экономических показателях.
Курсовая работа включает данную пояснительную записку, которая содержит все необходимые сведения о проектировании автоматической линии; чертеж компоновки автоматической линии с обозначением всех позиций и спецификацией; циклограмма работы автоматической линии.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Справочник нормировщика-машиностроителя. Т.2. Техническое нормирование станочных работ.
2. Горбацевич А.Ф., Шкред В.А. Курсовое проектирование по технологии машиностроения. – Мн: Выш. Школа, 1983. – 256 с.
3. Справочник Технолога-машиностроителя. Т. 1 /Под ред. А.Г.Косиловой и Р.К.Мещерякова. – Г.: Машиностроение, 1985. – 656 с.; Справочник Технолога-машиностроителя. Т. 2 /Под ред. А.Г.Косиловой и Р.К.Мещерякова. – Г.: Машиностроение, 1985. – 496 с.
5. Проектирование и разработка промышленных роботов/ С. С. Аншин, А. В. Бабич, А. Г. Баранов и др.; Под общ. ред. Я. А. Шифрина, П. Н. Белянина. – М.: Машиностроение, 1989. -272 с.
6. Токарные полуавтоматы, автоматы и автоматизированные линии/ Б. Л.Богуславский – М.: Издательство Профтехиздат. 1961. – 591 с.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды