Использование современной компьютерной техники и программного обеспечения для решения прикладных задач в области геодезических измерений
Writeln('Дирекционный угол равен:');
Writeln(t2,'Дирекционный угол равен(в радианах):');
Writeln(Alfa23:6:3);{??}
Writeln(t2,Alfa23:6:3);{??}
End;
If (Dx23<0) and (Dy23>0) Then
Begin
Alfa23:=Pi-R23;{?}
Writeln('Для 2-3');
Writeln(t2,'Для 2-3');
Writeln('II четверть');
Writeln(t2,'II четверть');
Writeln('Дирекционный угол равен(в радианах):')
;
Writeln(t2,'Дирекционный угол равен(в радианах):');
Writeln(Alfa23:6:3);{??}
Writeln(t2,Alfa23:6:3);{??}
End;
If (Dx23<0) and (Dy23<0) Then
Begin
Alfa23:=Pi+R23;{?}
Writeln('Для 2-3');
Writeln(t2,'Для 2-3');
Writeln('III четверть');
Writeln(t2,'III четверть');
Writeln('Дирекционный угол равен(в радианах):');
Writeln(t2,'Дирекционный угол равен(в радианах):');
Writeln(Alfa23:6:3);
Writeln(t2,Alfa23:6:3);{??}
End;
If (Dx23>0) and (Dy23<0) Then
Begin
Alfa23:=(2*(Pi)+R23);{?}
Writeln('Для 2-3');
Writeln(t2,'Для 2-3');
Writeln('IV четверть');
Writeln(t2,'IV четверть');
Writeln('Дирекционный угол равен(в радианах):');
Writeln(t2,'Дирекционный угол равен(в радианах):');
Writeln(Alfa23:6:3);{??}
Writeln(t2,Alfa23:6:3);{??}
End;
End;
Writeln('Для 2-3:');
Gradus(Alfa23);{использование подпрограммы для перевода значений из радиан в градусы}
writeln; {пропуск пустой строки}
Begin
{Координаты искомого пункта}
RB1P1:=(((Pi)/180)*(GB1P1+(MB1P1/60)+(SB1P1/3600)));
RB1P2:=(((Pi)/180)*(GB1P2+(MB1P2/60)+(SB1P2/3600)));
RB2P2:=(((Pi)/180)*(GB2P2+(MB2P2/60)+(SB2P2/3600)));
RB2P3:=(((Pi)/180)*(GB2P3+(MB2P3/60)+(SB2P3/3600)));
xP12:=x1+(((y2-y1)*sin(RB2P2))/(sin(Alfa12)*sin(RB1P1+RB2P2)))*cos(Alfa12-RB1P1);
yP12:=y1+(((y2-y1)*sin(RB2P2))/(sin(Alfa12)*sin(RB1P1+RB2P2)))*sin(Alfa12-RB1P1);
xP23:=x2+(((y3-y2)*sin(RB2P3))/(sin(Alfa23)*sin(RB1P2+RB2P3)))*cos(Alfa23-RB1P2);
yP23:=y2+(((y3-y2)*sin(RB2P3))/(sin(Alfa23)*sin(RB1P2+RB2P3)))*sin(Alfa23-RB1P2);
Writeln('Координаты искомого пункта');
writeln;
Writeln(t2,'Координаты искомого пункта');
writeln(t2);
Writeln('x1-2=');
Writeln(t2,'x1-2=');
Writeln(xP12:6:2);
Writeln(t2,xP12:6:2);
Writeln('y1-2=');
Writeln(t2,'y1-2=');
Writeln(yP12:6:2);
Writeln(t2,yP12:6:2);
Writeln('x2-3=');
Writeln(t2,'x2-3=');
Writeln(xP23:6:2);
Writeln(t2,xP23:6:2);
Writeln('y2-3=');
Writeln(t2,'y2-3=');
Writeln(yP23:6:2);
Writeln(t2,yP23:6:2);
srX:=(xP12+xP23)/2;
srY:=(yP12+yP23)/2;
Writeln('Среднее X');
writeln;
Writeln(t2,'Среднее X');
writeln(t2);
Writeln(srX:6:2);
Writeln(t2,srX:6:2);
Writeln('Среднее Y');
Writeln(t2,'Среднее Y');
Writeln(srY:6:2);
Writeln(t2,srY:6:2);
writeln;writeln;writeln; {добавление личной подписи}
writeln(t2);writeln(t2);writeln(t2);
writeln('All rights are reserved');
writeln('Made by MOISEEV ANDREI GG-09-2');
End;
Close (t1); {закрытие файлов}
Close (t2);
Readkey;
End.
2.6 Результаты работы программы
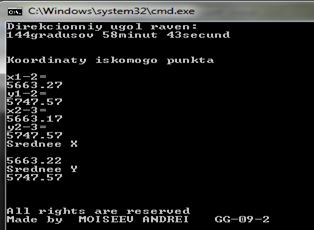
Рис.2.3 Результат работы программы
Приращения
По оси X для 1-2
-303.23
По оси Y для 1-2
-338.86
По оси X для 2-3
-471.39
По оси Y для 2-3
330.33
Румб 1-2
0.840832
Румб 2-3
0.611234
Для 1-2
III четверть
Дирекционный угол равен:
228 градусов 10 минут 34 секунд
Для 2-3
II четверть
Дирекционный угол равен(в радианах):
2.530
Дирекционный угол равен:
144 градусов 58 минут 43 секунд
Координаты искомого пункта
x1-2=
5663.27
y1-2=
5747.57
x2-3=
5663.17
y2-3=
5747.57
Среднее X 5663.22
Среднее Y 5747.57
2.7 Проверка в MS Excel
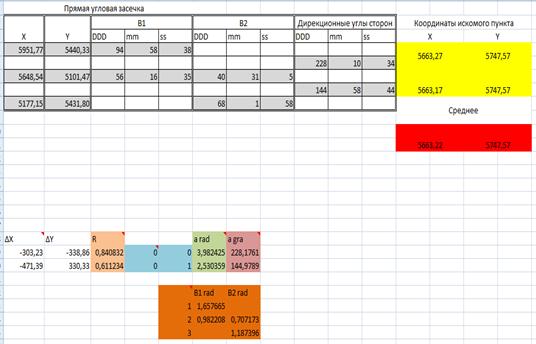
Рис. 2.4 Проверка в MS Excel
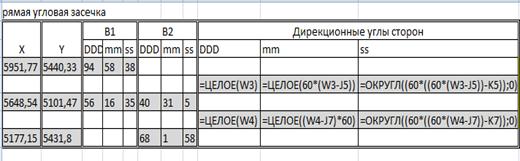
Рис. 2.5 Лист Excel в режиме отображения формул
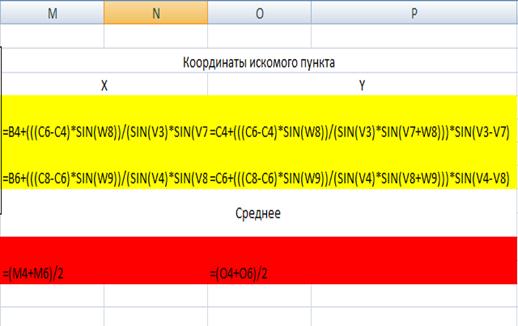
Рис. 2.6 Лист Excel в режиме отображения формул
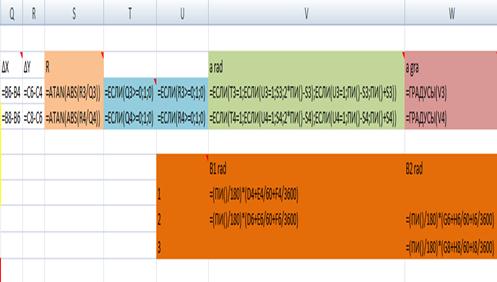
Рис. 2.7 Проведение промежуточных расчетов
2.8. Проверка в MathCad
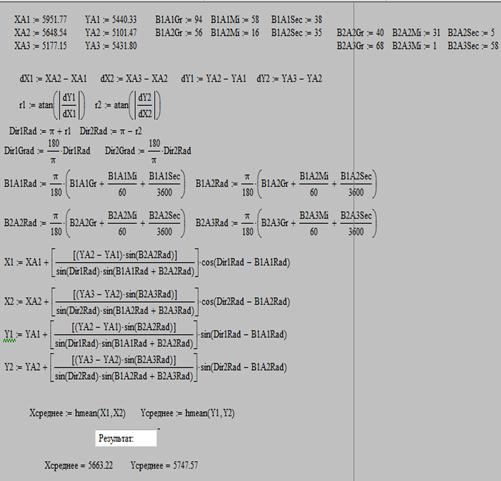
Рис. 2.8 Проверка в MathCad
2.9 Анализ результатов
Сравнивая результаты работы программы с проверкой в табличном редакторе Excel и математическом пакете MathCad, можно удостовериться в правильности работы программы и выборе алгоритма ее работы.
3. Обратная геодезическая засечка
3.1 Теоретические сведения
На плоскости задана система точек ![]() с известными координатами (xi, yi ). При использовании обратной геодезической засечки теодолит располагают непосредственно на точке Р , координаты которой требуется определить. На точки с известными координатами (их должно быть не менее трех) устанавливают визирные цели, после чего измеряют горизонтальные углы (рис.3.1).
с известными координатами (xi, yi ). При использовании обратной геодезической засечки теодолит располагают непосредственно на точке Р , координаты которой требуется определить. На точки с известными координатами (их должно быть не менее трех) устанавливают визирные цели, после чего измеряют горизонтальные углы (рис.3.1).
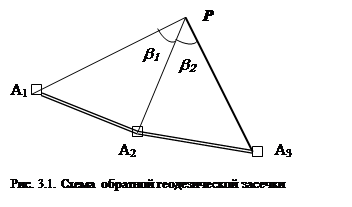
Для однозначного определения координат точки Р достаточно рассмотреть два треугольника, однако в этом случае решение задачи является бесконтрольным. Инструкции по проведению геодезических измерений требуют включать, как минимум, четыре точки с известными координатами и определять координаты вставляемой точки, соответственно, по трем или более треугольникам.
Избыточность исходных данных позволяет повысить надежность определения окончательных значений искомых величин за счет применения правила арифметического среднего.
Для определения координат вставляемой точки предварительно определяем вспомогательные величины n и m.
![]() (3.1)
(3.1)
![]() (3.2)
(3.2)
Далее находим углы ![]() и определяем координаты вставляемой точки.
и определяем координаты вставляемой точки.
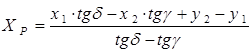 (3.3)
(3.3)
![]() (3.4)
(3.4)
3.2 Постановка задачи
Обратная геодезическая засечка. Требуется определить координаты точки P по трем точкам с известными координатами и двум известным углам (каждый угол – угол мужду 2 соседними точками с вершиной в точке P).
3.3 Исходные данные
Табл. 3.1
|
Пункты |
Направления |
X |
Y |
|
Хутор |
0 0 0 |
11327.11 |
9315.82 |
|
Крутик |
75 46 14 |
11588.28 |
11619.02 |
|
Юрьево |
168 7 51 |
8901.34 |
11230.33 |
|
Локно |
278 52 25 |
9054.58 |
7892.42 |
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности