Применение колтюбинговой технологии в бурении
Усилие, развиваемое транспортером, при работе двух гидромоторов при их номинальном давлении
P = 2Мкр.ном/R,
где Мкр.ном – крутящий момент на валу каждой из ведущих звездочек транспортера; R – радиус звездочки (R = 114 мм).
Момент
Мкр.ном = Мг.м.номi,
где Мг.м.ном – крутящий момент, развиваемый гидромотором, при номинальном давлении, i – передаточное число редуктора, устано
вленного между гидромотором и звездочкой (i = 24).
При работе гидромотора с перепадом давления, отличающимся от номинального значения, крутящий момент, развиваемый гидромотором,
Мг.м = Мг.м.номРг/Рном,
где Рном – давление, соответствующее номинальному крутящему моменту на валу гидромотора; Рг – рабочее давление в гидроприводе.
Аналогичные зависимости имеют место и для страгивающего момента. Окончательно усилие, развиваемое транспортером при постоянном движении (при номинальном режиме работы гидромотора),
P = 2Мг.м.номi/R = 2×342×24/0,114 = 144 кН.
Усилие, действующее на гибкую трубу при страгивании,
P = 2Мг.м.стрi/R = 2×258×24/0,114 = 108,63 кН.
3.2. Барабан (лебедка)
Определение емкости барабана
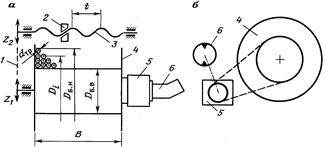
Емкость барабана определяется его габаритами и диаметром гибкой трубы, наматываемой на него (рис. 16, а). Габариты барабана – внутренний Dб.в и наружный Dб.н диаметры, длина рабочей части Lб.
При проектировании внутренний диаметр барабана устанавливают, исходя из опыта эксплуатации аналогичных установок, обычно Dб.в = 1600 мм для труб диаметром 25 мм, наружный диаметр принят из конструктивных соображений – возможности установки барабана на конкретное автомобильное шасси – Dб.н = 1900 ¸ 2400 мм, длина рабочей части барабана Lб = 1200 мм.
Число рядов труб, наматываемых на барабан, определяют по формуле
Z = (Dб.н – Dб.в)/2dтр,
откуда
Z = (1900 – 1600)/2×25 = 6.
Число витков трубы, намотанной на барабан в одном ряду,
i = [Lб/(dтр + as)] – 1,
где as – сумма допуска на овальность трубы и зазора между трубами (as = 1 мм),
отсюда
i = [1200/(25 + 1)] – 1 = 45.
Емкость барабана рассчитывают по формуле
L = piZ(Dб.в + dтрZ) = 3,14×45×6×(1600 + 25×6) = 1483 м.
Масса трубы, намотанной на барабан,
Mтр = Lqтр,
где qтр – масса 1 м трубы.
Для 1 м трубы при ее диаметре 25 мм и толщине стенки 2 мм qтр = 1,435 кг, а соответственно при 33 мм и 3 мм qтр = = 2,808 кг.
Для труб диаметрами 25 и 33 мм их массы соответственно будут
Mтр = 1483×1,435 = 2128 кг;
Mтр=1483×2,808 = 4164 кг.
|
| ||
|
Рис. 16. Кинематическая схема барабана для наматывания колонны гибких труб и их укладчика при использовании планетарного редуктора (а) и цепной передачи (б): 1 – цепная передача привода механизма укладки КГТ (Z1, Z2 – число зубьев звездочек); 2 – каретка; 3 – ходовой винт; 4 – катушка; 5 – планетарный редуктор; 6 – гидравлический мотор. | ||
3.3.Трубоукладчик
Механизм укладчика трубы на барабан обеспечивает ее плотную регулярную намотку без образования пережимов и петель. При работе в штатном режиме перемещение каретки укладчика должно быть синхронизировано с вращением барабана. Подобная система принята во всех агрегатах, производимых в США и Канаде (см. рис. 16).
На ряде установок работой укладчика трубы на барабан оператор управляет вручную. В таких условиях он должен концентрировать свое внимание на приборах пульта управления, поэтому подобную конструкцию следует считать не соответствующей современному уровню развития оборудования данного типа.
В то же время механизм укладчика должен обеспечивать возможность ручной корректировки укладки трубы, что обусловлено, например, неизбежным смещением наружных витков при транспортировании агрегата со скважины на скважину, отклонением наружного диаметра от номинального из-за смятия трубы, погрешности ее изготовления и т.д.
Кинематическая схема укладчика включает (см. рис. 16) каретку, установленную на ходовом винте с шагом t, цепную передачу (или передачи) с передаточным отношением i, обеспечивающую синхронизацию движения каретки и барабана. Ведомая звездочка цепной передачи соединена с ходовым винтом посредством кулачковой муфты. Ходовой винт также имеет привод от гидромотора, вал которого соединен с ходовым винтом через редуктор.
Условие согласования перемещения каретки и вращения барабана следующее: один оборот барабана должен соответствовать перемещению каретки на величину, равную диаметру гибкой трубы.
Частота вращения ходового винта
nх.в = nб(Z1/Z2),
где nб – частота вращения барабана; Z1, Z2 – число зубьев соответственно ведущей и ведомой звездочек (Z1/Z2 = i).
Перемещение каретки по ходовому винту
s = tnх.в = tnбZ1/Z2.
За один оборот барабана каретка должна переместиться на величину диаметра укладываемой трубы, т.е. s = dтр.
Тогда
dтр = t(Z1/Z2) = ti.
Таким образом, кинематические характеристики укладчика трубы не зависят от емкости барабана и числа рядов труб на нем, а определяются только шагом винта укладчика и передаточным отношением синхронизирующей цепной передачи.
3.4. Привод
Привод включает в себя двигатель, обеспечивающий энергией все системы агрегата, и трансмиссию.
В зависимости от параметров агрегата принято использовать следующие схемы приводов:
а)для легких установок – двигатель транспортной базы, т.е. ходовой двигатель серийного автомобильного шасси;
б)для средних и тяжелых установок используют один из двух вариантов:
– палубный двигатель при выполнении агрегата на прицепе, транспортируемом обычным автомобилем-тягачом. При этом число блоков, когда каждый смонтирован на отдельном прицепе, а в целом составляющих единый комплекс, может быть равно двум или трем;
– двигатель, мощность которого определяется согласно условию обеспечения энергией агрегата при монтаже его на специально спроектированном автомобильном шасси. При этом для передвижения используют двигатель агрегата. По существу данный двигатель является палубным, который применяют в качестве ходового. Как и в предыдущем случае, агрегат представляет комплекс, состоящий из двух-трех автономно передвигающихся устройств.
Наиболее простой и рациональной является кинематическая схема легкого агрегата при условии его полной гидрофикации. Последнее позволяет компоновать оборудование агрегата исходя из оптимальных условий взаимного расположения его компонентов как для обеспечения функционирования агрегата на скважине, так и для выполнения требований, предъявляемых к нему как к транспортному средству.
Другие рефераты на тему «Геология, гидрология и геодезия»:
Поиск рефератов
Последние рефераты раздела
- Анализ условий формирования и расчет основных статистических характеристик стока реки Кегеты
- Геодезический чертеж. Теодолит
- Геодезические методы анализа высотных и плановых деформаций инженерных сооружений
- Асбест
- Балтийско-Польский артезианский бассейн
- Безамбарное бурение
- Бурение нефтяных и газовых скважин