Колонна для перегона коньячного спирта
0.9954 0 0 0 0 0 0 0
0.0135 0.9933 0 0 0 0 0 0
0 0 0.9910 0 0 0 0 0
0 0 0.1439 0.9277 0 0 0 0
0 0 0 0 0.9976 0 0 0
0 0 0 0 0.0119 0.9940 0 0
-1.0000 1.0000 0 0 0 0 1.0000 0
0 0 -1.0000 1.0000 -1.0000 1.0000 0 1.0000
B1 =
-0.5429 0
-0.2525 0
-0.0047 0
20.2483 0
1.9628 0
2.9803 0
0.0200 0
0 0.0326
0 0.0021
0 0.0000
0 -0.0
618
0 -0.0045
0 -0.0123
0 -0.0001
0 0
0 0
C1 =
Columns 1 through 13
0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0
Columns 14 through 16
0 1 0
0 0 1
K =
Columns 1 through 8
0.0367 -0.0578 0.0407 0.0634 0.0239 -0.0813 0.1013 0.0485
21.0412 -24.2138 21.6345 4.5472 11.1495 -21.5375 25.0390 22.7474
Columns 9 through 16
-0.0419 0.0319 0.0446 0.0349 -0.0865 0.1026 0.0000 0.0001
-21.8436 20.3135 0.9756 13.2017 -22.4572 25.2658 0.0195 0.0270
L =
0.0925 -0.0000
0.1180 0.0000
0.3752 0.0000
0.0000 0.0568
0.0000 0.1807
0.0000 0.0279
-0.0000 0.2379
0.0694 -0.0000
0.0275 0.0000
0.2971 0.0000
-0.0000 0.0629
-0.0000 0.1964
0.0000 0.0673
0.0000 0.3243
1.6139 0.0000
0.0000 1.6702
5 Моделирование замкнутой системы и оценка качества переходных процессов
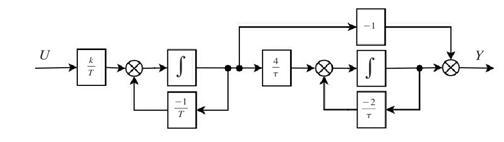
Рисунок 5 – Структурная схема системы в виде переменных состояния с учетом запаздывания.
Для получения переходных процессов следует сформировать матрицы замкнутой системы и получить переходные процессы с помощью программы dstep .
AA=[A1 -B1*K;L*C1 A1-B1*K-L*C1];
BB=[B1;zeros(n+l,m)];
CC=[C zeros(l) zeros(l,n+l)];
При оценке качества переходных процессов необходимо чтоб управляющее воздействие не превышало 100% открытия.
Максимальное возмущение следует принять на уровне 10% номинального значения соответствующих параметров. Допустимое значение урегулированных переменных нужно принять равными 20% номинального значения. Если качество не соответствует нужно сменить весовые матрицы и повторить расчет.
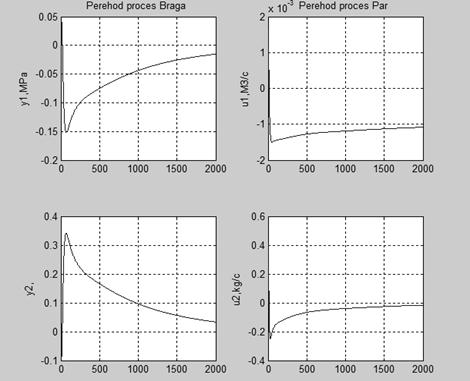
Рисунок 6.Переходные процессы замкнутой системы.
Проанализировав переходные процессы можно сделать вывод, что значения регулируемых параметров не превышают допустимых. Для определения времени регулирования нужно количество итераций цикла умножить на шаг: ![]() .
.
6 Преобразование модели регулятора в форму, отвечающую ее реализации в програмном обеспечении
ПИ закон регулирования вычисляется по формулам:
K1=K(:,1:14);
K2=K(:,15:16);
L1=L(1:14,:);
L2=L(15:16,:);
Ar=[Ad-Bd*K1 -Bd*K2-L1 L1; C eye(2)-L2 L2; zeros(2,14) zeros(2) eye(2)];
Br=[zeros(14,2); zeros(2); eye(2)];
Cr=[-K zeros(2)];
Az=[Ad Bd*Cr; Br*C Ar];
Bf=[Bd; zeros(18,2)];
Bz=[zeros(14,2); Br];
Cz=[C zeros(2,18)];
и записать замкнутую систему в вид в котором она будет реализована в программном обеспечении:
x=zeros(14,1);xr=zeros(18,1); u=zeros(2,1);
yy=[]; uu=[];f=[.0010;.0010];z=[0;0];
for i=1:2000,
y=C*x; e=-z+y;
u=Cr*xr; xr=Ar*xr+Br*e;
y=C*x; x=Ad*x+Bd*(u+f);
yy=[yy; y']; uu=[uu; u'];
end
x1=x; xr1=xr; u1=u;
В результате выполнения программного кода будут получены переходные процессы изменения возмущения, которое поступает на каждый из каналов регулирования и переходные процессы на выходе системы.
7 Выбор технических средств реализации системы управления
Технические средства реализации системы правления включают датчики ругулированых параметров, исполнительные механизмы и регулирующие органы, преобразователи,рабочая станция
Общая структурная схема рабочей станции изображена на рисунке
Рабочая станция имеет вид:
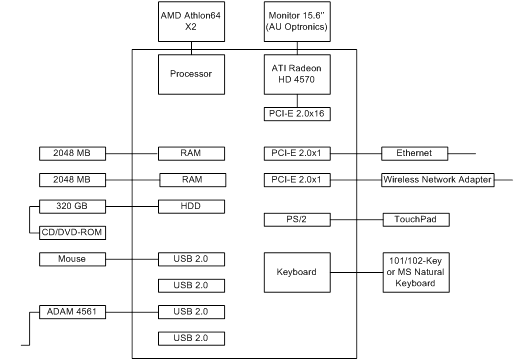
Рисунок 7 – Схема рабочей станции
Таблица 3
Спецификация технических средств:
|
№ |
Тип |
К-во |
Предназначение |
|
1б,2б |
ADAM 4012 |
2 |
Модуль аналогового ввода с датчиков давления, спиртометра, тип входного сигнала: mV, V или mA, диапазон: ±150мВ, ±20мА, ±5В, ±10В |
|
ADAM 4561 |
1 |
Преобразователь интерфейса USB в RS-232/422/485 | |
|
1а |
Сапфир-22М-ДА2050 |
1 |
Датчик давления в магистрали, верхние пределы измерений: 1.6 МПа, Предел допускаемой основной погрешности, 0,5 0,25; 0,5%, вых. 0-5; 4-20; 5-0; 20-4мА, |
|
2а |
Alcolyzer Plus Spirits |
1 |
Спиртомер для крепких спиртных напитков; Диапазон измерения: Спирт: от 35 до 65 об. % (значения отображаются от 0 до 90 об. % спирта, однако, при содержании спирта менее 35 об. % и более 65 об. % точность измерения уменьшается); Значение рН (опционально): от 0 до 14; Цвет (опционально): от 0 до 120 EBC; Плотность (опционально): от 0 до 3 г/см3; |
|
2д,3д |
ADAM 4069 |
2 |
Модуль c релейными выходами, 8 реле с нормально разомкнутым контактом, нагрузочная способность контактов: 250 В/ 5 A для перем. тока, 30 В/ 5 A для пост. тока, время включения 5 мс , время выключения 5,6 мс |
|
2г,2в, 3в,3г |
МЭО 40/25-0,25 |
4 |
Механизм исполнительный одно-оборотный , номинальный крутя-щий момент 40кгс/м, номинальный ход выходного органа 0,25 оборота за 25с, Напряжение питания 220В. Частота 50Гц |
|
2г,2в |
КРП-100 |
2 |
Клапан регулирующий, Ду=50мм |
|
3г,3в |
КРП-100 |
2 |
Клапан регулирующий, Ду=200мм |
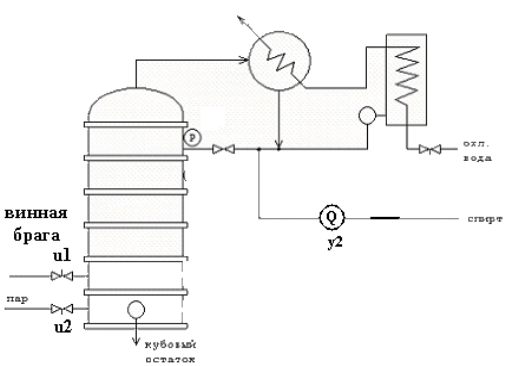
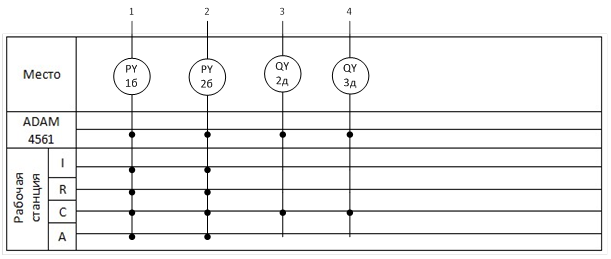 Рисунок 8. Функциональная схема автоматизации.
Рисунок 8. Функциональная схема автоматизации.
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели