Особенности входа в поворот многоосных автомобилей с различными схемами управляемых осей
Значительную часть общего пробега автомобиля составляет движение по криволинейной траектории. При этом способность автомобиля совершать такие маневры как "переставка", "вход в поворот" и "рывок руля", существенным образом определяет его безопасность. Особенно остро эти вопросы касаются растущего парка многоосных автомобилей, увеличенная база которых потенциально
снижает их управляемость и поворачиваемость, создавая предпосылки для совершения дорожно-транспортных происшествий.
В работе рассматривается процесс входа в поворот многоосных автомобилей с различными схемами расположения управляемых осей, как основополагающий для оценки их управляемости и поворачиваемости.
Анализ исследований, проведенных Д.А. Антоновым, П.В. Аксеновым, Я.Е. Форобиным, М.А. Подригало, В.П. Волковым, Е.Е. Александровым, В.П. Сахно, А.С. Литвиновым, В.В. Стельмащук, О.А., и др., показывает, что известные математические модели для оценки управляемости и поворачиваемости при входе в поворот многоосных автомобилей с различными схемами управляемых осей сложно использовать на стадии проектирования. При этом большинство авторов сходятся в том, что для оценивания криволинейного движения автомобиля должны использоваться такие параметры, как угловые скорость и ускорение продольной оси автомобиля, изменение радиуса кривизны траектории движения в зависимости от угла поворота управляемых колес (УК).
Целью настоящего исследования являлась разработка основ методики оценки динамической поворачиваемости многоосных автомобилей с различными схемами расположения управляемых осей при входе в поворот на стадии проектирования.
автомобиль управляемая ось поворот
В качестве объекта исследования рассматривались четырехосные автомобили с двумя схемами управляемых осей: автомобиль с двумя передними управляемыми осями - схема 1-2-00 (рисунок 1) и автомобиль с передней и задней управляемыми осями - с схема 1-00-4 (рисунок 2).
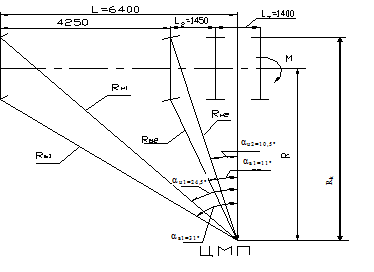
Рис.1. Схема автомобиля 1-2-00
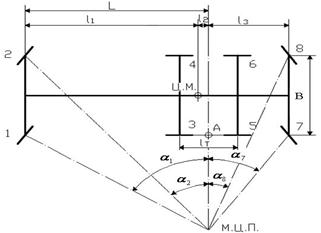
Рис.2. Схема автомобиля 1-00-4
На каждое из УК каждой оси действуют свои силы и моменты. При этом каждое УК отклоняется на определенный угол увода, которые в совокупности существенно влияют на действительную кривизну траектории движения. Следовательно, для оценки входа в поворот многоосного автомобиля предпочтительно использовать математическую модель с алгоритмом определения действительного радиуса кривизны траектории движения с учетом увода, предложенными в работе [1]. Указанные модель и алгоритм позволяют еще на стадии проектирования с достаточной точностью аналитически определить параметры криволинейного движения многоосных автомобилей за счет определения скоростного момента и момента сопротивления криволинейному движению на каждом колесе транспортного средства.
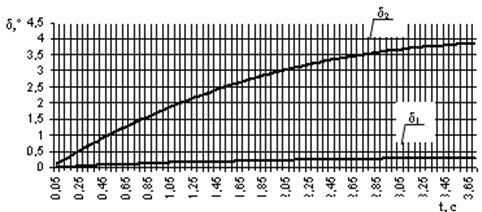
Рис.3. Изменение углов увода во времени первой и четвертой оси автомобиля со схемой 1-2-00
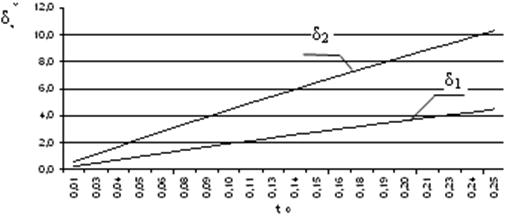
Рис.4. Изменение углов увода во времени первой и второй оси автомобиля со схемой 1-00-4
На рисунке 3 и 4 показано изменение угла увода первой и второй осей у автомобилей с различными схемами управления. Представленные зависимости свидетельствуют о том, что у обоих автомобилей углы увода второй управляемой оси значительно больше, чем первой. Именно этот факт и вызывает больший износ шин второй управляемой оси на образцах автомобилей КрАЗ-7140 Н6.
Для оценки криволинейного движения автомобиля важно определить насколько траектория, задаваемая водителем, будет отличаться от действительной траектории. Поэтому для сравнительной оценки поворачиваемости многоосных автомобилей с различными схемами управляемых осей более корректно использовать не действительные радиусы кривизны траектории, а безразмерные величины: отношение кинематического радиуса (на жестких шинах) к действительному (с учетом углов увода всех УК) [2]:
 , (1)
, (1)
где ![]() - расстояние между управляемыми осями;
- расстояние между управляемыми осями;
![]() - смещение центра мгновенного поворота от второй управляемой оси;
- смещение центра мгновенного поворота от второй управляемой оси;
![]() - угол увода внутренного колеса передней управляемой оси;
- угол увода внутренного колеса передней управляемой оси;
![]() - угловая скорость вращения внутреннего УК первой управляемой оси вокруг оси шкворня;
- угловая скорость вращения внутреннего УК первой управляемой оси вокруг оси шкворня;
![]() - передаточное отношение;
- передаточное отношение;
![]() - время.
- время.
Изменение отношения радиусов кривизны траектории во времени для рассматриваемых автомобилей представлено на рисунках 5 и 6.
|
Рис.5. Изменение отношения радиусов кривизны траектории автомобиля со схемой 1-2-00
Рис.6. Изменение отношения радиусов кривизны траектории автомобиля со схемой 1-00-4
Известно, что наилучшей управляемостью обладают автомобили, имеющие нейтральную поворачиваемость. Это значит, что отношение ρк/ ρд должно стремиться к единице для обеих схем расположения управляемых осей.
Из рисунка 5 видно, что для схемы управления автомобилем по схеме 1-2-00 это отношение для первой управляемой оси близко к единице и, практически, постоянно на всем диапазоне времени входа в поворот, для второй оси - ρк/ ρд = var ≠ 1. Анализ представленных данных свидетельствует о том, что необходимо увеличить углы поворота УК второй оси и изменить взаимосвязь углов поворота внуреннего и внешнего УК второй оси. Для этих целей может быть использована модель, предложенная в работе [1], что было подтверждено экспериментально с высокой степенью сходимости результатов для опытного образца КрАЗ-7140 Н6 с колесной формулой 8×6.
Автомобиль со схемой управления 1-00-4 (рисунок 6) обладает избыточной поворачиваемостью. Особенно она велика в начальный момент входа в поворот. Следовательно, необходимо организовать запаздывание поворота УК второй оси во времени на величину, для определения которой на стадии проектирования может быть использована математическая модель [1].
Используя зависимости угловой скорости и углового ускорения продольной оси автомобиля от времени при входе в поворот [1]:
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск