Автоматизация питающего бункера чесальной машины
n = 0 -0.0113 0.0188 0.0580
d = 1.0000 -1.7658 1.0929 -0.2527
где n, d соответственно числитель и знаменатель дискретной передаточной функции.
Получим дискретную передаточную функцию:
>> zn4s=tf(n,d,ts)
Transfer function: -0.01133 z^2 + 0.01876 z + 0.05795
z^3 - 1.766 z^2 + 1.093 z - 0.2527
Sampling time: 2.5
Преобразуем дискретную модель в непрерывную и пр
едставим ее в виде передаточной функции:
>> sn4s=d2c(zn4s)
Transfer function:
0.01754 s^2 - 0.02422 s + 0.008271
--------------------------------------
s^3 + 0.5502 s^2 + 0.1395 s + 0.009408
Приведенные передаточные функции являются одной и той же моделью, записанной в разных формах и форматах.
Проанализируем динамические характеристики модели. Для чего построим переходную характеристику ТОУ для дискретной и непрерывной моделей и определим основные показатели переходного процесса.
На графиках переходных процессов ступенчатой линией представлен переходной процесс дискретной модели, а сплошной линией – непрерывной модели. Основные характеристики переходного процесса следующие:
· Время нарастания переходного процесса (Rise time) составляет для дискретной модели 22.5, а для непрерывной – 22.2;
· Время регулирования (Setting time) составляет для дискретной модели 37.5, а для непрерывной – 37.5;
· Установившееся значение выходной величины (Final value) для дискретной модели и непрерывной – 0.879.
Для построения переходной характеристики воспользуемся командой:
>> step(zn4s,sn4s)
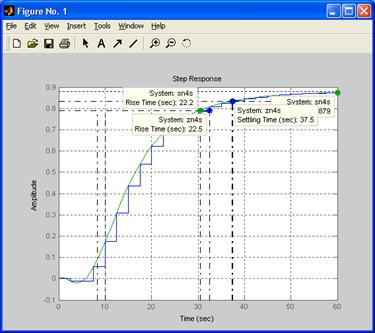
Рисунок 2.1.9 Переходные характеристики дискретной и непрерывной моделей
Для построения импульсной характеристики воспользуемся командой:
>> impulse(zn4s,sn4s)
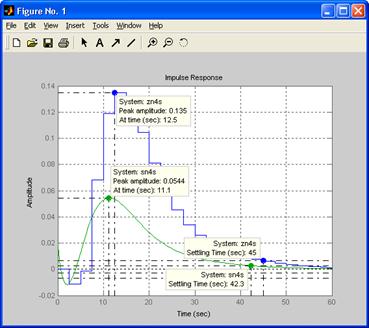
Рисунок 2.1.10 Импульсные характеристики дискретной и непрерывной моделей
Основными характеристиками модели ТОУ при подаче на вход единичного импульсного воздействия являются (см. рисунок 2.1.10):
· Пиковая амплитуда (Peak amplitude) составляет для дискретной модели 12.5, а для непрерывной – 11.1.
· Время регулирования составляет для дискретной модели 45 с., а для непрерывной модели 42.3 с.
Определим частотные характеристики моделей с помощью команды:
>> bode(zn4s,sn4s)

Рисунок 2.1.11 Частотные характеристики дискретной и непрерывной моделей
На графиках частотных характеристик ЛАХ и ЛФХ указаны значения запасов устойчивости (см. рисунок 2.1.11):
· по амплитуде (Gain Margin), которые для дискретной модели составляют 9.19 dB, а для непрерывной модели – 10.3 dB.
· по фазе (Phase Margin), которые для дискретной и непрерывной модели равны бесконечности.
Анализ частотных характеристик показывает, что модели zn4s и sn4s являются устойчивыми с соответствующими запасами устойчивости по амплитуде. Запас устойчивости по фазе равен бесконечности.
Этот вывод подтверждается так же комплексной амплитудно-фазовой характеристикой АФХ, которая в зарубежной литературе называется диаграммой Найквиста, так как годограф АФХ не пересекает точку комплексной плоскости с координатами -1,j0.
Для построения АФХ необходимо воспользоваться командой:
>> nyquist(zn4s,sn4s)
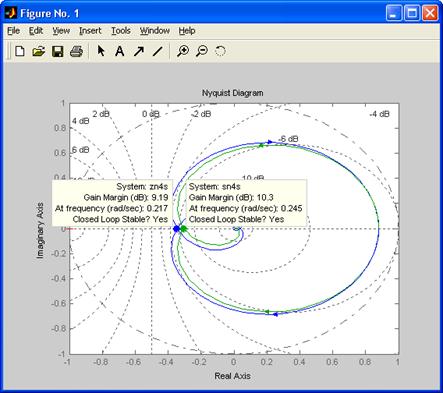
Рисунок 2.1.12 Амплитудно фазовые характеристики дискретной и непрерывной моделей
Значения запасов устойчивости можно определить также и в режиме командной строки MATLAB с помощью команды
|
Для непрерывной модели |
Для дискретной модели |
|
>> [Gm,Pm,Wcg,Wcp]=margin(sn4s) Gm = 3.2786 Pm = Inf Wcg = 0.2452 Wcp = NaN >> Gmlog=20*log10(Gm) Gmlog = 10.3138 |
>> [Gm,Pm,Wcg,Wcp]=margin(zn4s) Gm = 2.8807 Pm = Inf Wcg = 0.2171 Wcp = NaN >> Gmlog=20*log10(Gm) Gmlog = 9.1899 |
где Gm – запас устойчивости по амплитуде в натуральных величинах на частоте Wcg, Pm – запас устойчивости по фазе на частоте Wcp.
Как видно, определение запасов устойчивости последним способом позволяет значительно точнее вычислять эти значения, чем на графиках частотных характеристик.
Определим статический коэффициент усиления модели ТОУ с помощью команды:
>> k=dcgain(sn4s)
k=
0.8791
Для решения задач анализа и синтеза систем управления важно знать ответ на другой не менее важный вопрос, чем полученные временные, частотные и статистические характеристики: обладает ли объект свойством управляемости в смысле возможности его перевода из заданной начальной точки (или области) в заданную конечную точку (или область)? До второй половины девятнадцатого столетия проблема управляемости - проблема установления обладания объектом свойством управляемости решалась чисто интуитивно на основе инженерных знаний и опыта. В настоящее время, с развитием метода переменных состояния стало возможным строгое определение свойства управляемости и установление критерия управляемости.
Решение проблемы управляемости основано на анализе уравнений переменных состояния и формулируется следующим образом: объект называется вполне управляемым, если выбором управляющего воздействия u(t) на интервале времени [t0> tk;] можно перевести его из любого начального состояния y(to) в произвольное заранее заданное конечное состояние y(tk).
Критерием управляемости линейных стационарных объектов является условие: для того чтобы объект был вполне управляем, необходимо и достаточно, чтобы ранг матрицы управляемости
Ми = (В АВ А2В . Аn-1 В)
равнялся размерности вектора состояний п
rang Mu = n.
В пакете Control System Toolbox имеется функция ctrb, формирующая матрицу управляемости в пространстве состояний. Для того, чтобы воспользоваться этой функцией необходимо вычислить матрицы А, В, С, D с помощью команды:
>> [A,B,C,D]=ssdata(sn4s)
A =
-0.5502 -0.1395 -0.0188
1.0000 0 0
0 0.5000 0
B =
0.2500
0
0
C =
0.0702 -0.0969 0.0662
D =
0
Вычислим матрицу управляемости:
>> Mu=ctrb(A,B)
Mu =
0.2500 -0.1375 0.0408
0 0.2500 -0.1375
0 0 0.1250
Определим ранг матрицы управляемости:
>> n1=rank(Mu)
n1 =
3
Таким образом, для исследуемой модели объекта размерность вектора состояний, определяемая размером матриц А и В равна трем и ранг матрицы управляемости Мu также равен трем, что позволяет сделать вывод о том, что объект автоматизации является вполне управляемым, т.е. для него имеется такое управляющее воздействие u(t), которое способно перевести на интервале времени [to, tk] объект из любого начального состояния у (to) в произвольное заранее заданное конечное состояние y(tk).
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды