Автоматическая система управления процессом испытаний электропривода лифтов
Координатный преобразователь Парка-Горева сориентирован совместно с системой координат разработанной имитационной модели АД. Благодаря этому на входы модели по напряжению ![]() и
и ![]() поступают компоненты пространственного вектора напряжения, представленного во вращающейся систем
поступают компоненты пространственного вектора напряжения, представленного во вращающейся систем
е координат.
3.2 Структурный и параметрический синтез регуляторов системы управления технологическим процессом
Системы векторного управления представляют собой класс систем автоматического управления ЭП переменного тока во вращающихся и определённым образом сориентированных системах координат с подчинённым регулированием переменных. Способ ориентации системы координат по вектору потокосцепления ротора управляемого АД делает схожим организацию системы векторного управления на структуру управления классическим ЭП постоянного тока с независимым возбуждением. Согласно анализу требований, предъявляемых к моментному ЭП, для управления АД в составе нагрузочного испытательного стенда наиболее подходящим способом является именно векторное управление с ориентацией системы координат по вектору потокосцепления ротора. В рамках синтеза управляющей системы предполагается разработка модифицированной системы векторного управления с учётом особенностей работы нагрузочного асинхронного ЭП в составе испытательного стенда.
При синтезе регуляторов для управления составляющими вектора
тока статора и потокосцеплением ротора использовался метод определения
желаемой передаточной функции с настройкой на модульный оптимум.
Для контуров управления частотой вращения и положением, ввиду минимизации ошибки по возмущению использована настройка на симметричный оптимум. По итогам синтеза регуляторов показатели качества в линеаризованной системе соответствуют ожидаемым значениям.
Контуры управления составляющими вектора тока статора
Для нахождения требуемой передаточной функции регулятора ![]() (p) выделим из всей системы ЭП отдельно взятый контур, рисунок 18 и сопоставим передаточную функцию объекта управления с желаемой с учётом используемой системы относительных единиц.
(p) выделим из всей системы ЭП отдельно взятый контур, рисунок 18 и сопоставим передаточную функцию объекта управления с желаемой с учётом используемой системы относительных единиц.
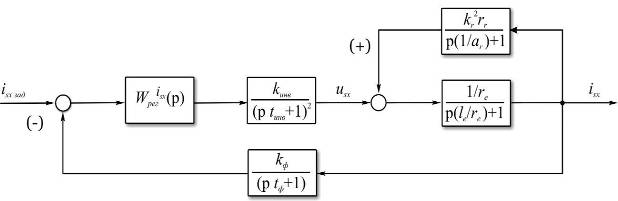
Рисунок 18 – Контур управления составляющей пространственного вектора тока статора ![]()
Согласно методике настройки на модульный оптимум, получаем выражение для передаточной функции регулятора:
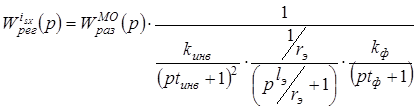 ,
,
где
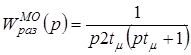
– передаточная функция эталонного разомкнутого контура, оптимизированного на модульный оптимум, а ![]() – малая некомпенсируемая постоянная времени, определяющая быстродействие контура после оптимизации.
– малая некомпенсируемая постоянная времени, определяющая быстродействие контура после оптимизации.
В итоге синтезирован пропорционально-интегральный регулятор со следующими параметрами:
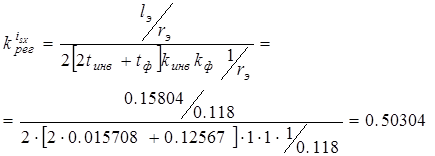
– коэффициент усиления,
![]()
– постоянная времени интегрирования.
Для проверки соответствия показателей качества оптимизированного контура ожидаемым значениям, проведём расчёт переходных процессов
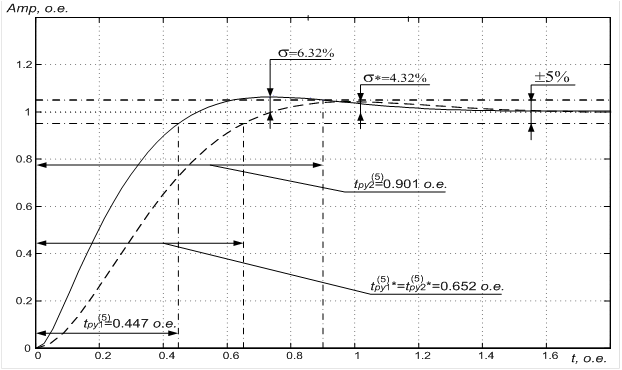
Рисунок 19 – График расчёта переходных процессов в оптимизированном контуре управления составляющей пространственного вектора тока ![]()
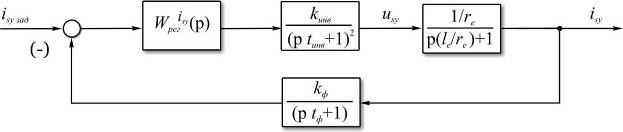
Рисунок 20 – Контур управления составляющей пространственного вектора тока статора ![]()
Таким образом, для контура управления составляющей пространственного вектора тока статора ![]() принимаем результаты оптимизации, полученные ранее при рассмотрении контура
принимаем результаты оптимизации, полученные ранее при рассмотрении контура ![]() :
:
 .
.
В итоге получаем пропорционально-интегральный регулятор со следующими параметрами:
– коэффициент усиления,
![]()
– постоянная времени интегрирования.
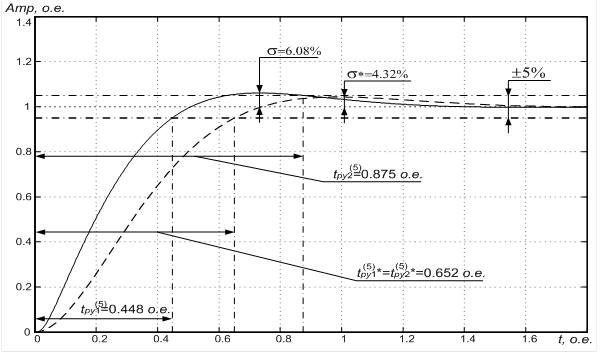
Рисунок 21 – График расчёта переходных процессов в оптимизированном контуре управления составляющей пространственного вектора тока ![]()
Контур управления потокосцеплением ротора
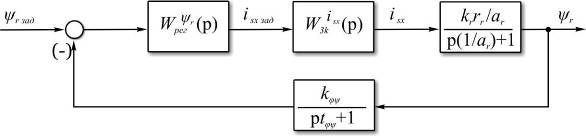
Рисунок 22 – Контур управления потокосцеплением ротора ![]()
В итоге для передаточной функции регулятора получаем следующее выражение:
 .
.
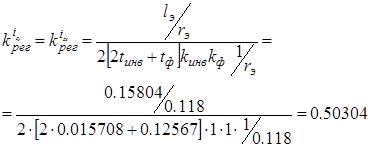
В итоге синтеза оказался получен пропорционально-интегральный регулятор со следующими параметрами:
 (3.31)
(3.31)
– коэффициент усиления и
![]() (о.е.) (3.32)
(о.е.) (3.32)
– постоянная времени интегрирования регулятора потокосцепления.
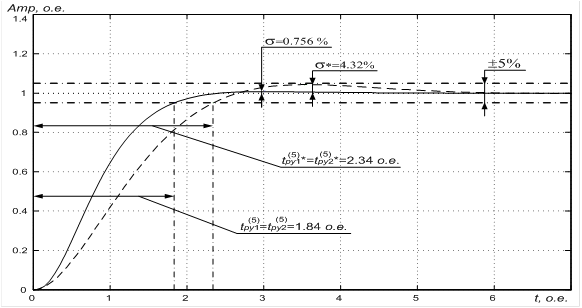
Рисунок 23 – График расчёта переходных процессов в оптимизированном контуре управления потокосцеплением ротора ![]()
Контур управления частотой вращения
При оптимизации контура управления частотой вращения ![]() необходимо использовать настройку на симметричный оптимум, так как в данном случае объект управления содержит интегральное звено, что приводит к необходимости использования пропорционального регулятора при настройке на модульный оптимум и делает невозможным получение системы астатической по возмущению. Именно поэтому при оптимизации контура скорости используем настройку на симметричный оптимум, а для приближения характеристик контура после оптимизации к характеристикам, соответствующим настройке на модульный оптимум на входе контура установим фильтр в виде апериодического звена.
необходимо использовать настройку на симметричный оптимум, так как в данном случае объект управления содержит интегральное звено, что приводит к необходимости использования пропорционального регулятора при настройке на модульный оптимум и делает невозможным получение системы астатической по возмущению. Именно поэтому при оптимизации контура скорости используем настройку на симметричный оптимум, а для приближения характеристик контура после оптимизации к характеристикам, соответствующим настройке на модульный оптимум на входе контура установим фильтр в виде апериодического звена.

Рисунок 24 – Контур управления частотой вращения ![]()
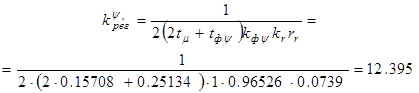
Согласно методике настройки на симметричный оптимум, получаем выражение для передаточной функции регулятора скорости
 ,
,
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды