Автоматическая система управления процессом испытаний электропривода лифтов
Характеристики:
|
Наименование |
Точность (имп./об.) |
Макс. скорость (об./мин.) |
Напряжение питания (В) |
Выходной сигнал |
Вес (кг) |
|
1XP8001-2 |
1024 |
12000 |
+10В до +30В |
цифровой |
0,3 |
Канал измерения момента, развиваемого испытуемым ЭП
Имея в основе тензометрический принцип, датчики крутящего момента KYOWA преобразуют кручение, соответствующее крутящему моменту, в электрический сигнал и передают электрический сигнал через контактное кольцо и щетку или вращающийся трансформатор и оптическое устройство. Они гарантируют точное и простое измерение момента, переданного от объекта с высокими частотами вращения. Так как все эти преобразователи используют тензорезисторы как чувствительный элемент, точное и устойчивое измерение достигается даже при длительных режимах действия и тяжелых условиях работы. Таким образом, они могут широко использоваться не только для экспериментов и исследований, но также и для индустриального измерения.
Характеристики:
|
Наименование |
Рекомендованное питание (В) |
Выходное сопротивление (ОМ) |
Макс частота вращения об/мин |
Выходной сигнал |
Вес (кг) |
|
KYOWA TP-E |
24 |
350 |
4000 |
цифровой |
0,6 |
Многофункциональные платы ввода-вывода применяемые для создания системы сбора и обработки данных, являются универсальными. Они имеют линейную входную характеристику и высокое входное сопротивление, являются согласованными для сигналов в диапазоне от -10В до +10В.
Нормализация реальных сигналов осуществляется путем использования системы согласующих модулей SCXI, встроенных в плату ввода-вывода. Плата ввода-вывода применяется для увеличения гибкости и общей помехоустойчивости системы. Оцифровка данных производится внутри микроконтроллера.
Данные передаются в компьютер в цифровом виде по интерфейсу RS-485.
Управление работой измерительной системы осуществляется с применением прикладного программного обеспечения, разработанного в среде LabVIEW и Visual C++. Пакет LabVIEW предназначен для работы с измерительными приборами, платами АЦП/ЦАП; в нем имеются встроенные функции анализа данных. Программы разрабатываются в виде блок-схем (диаграмм) процесса или задачи в графической среде программирования.
1.5 Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП
Управляющие функции АСУ ТП включают в себя действия по выработке и реализации управляющих воздействий на объект управления.
При реализации системы управления технологическим процессом испытаний ЭП лифтов используется последовательная система выработки управляющих воздействий на объект управления. В качестве управляющего воздействия используется задание на момент нагрузочного электродвигателя. В зависимости от стадии технологического процесса задание на момент меняется по циклограмме нагрузочного момента, которая подбирается индивидуально для каждого испытуемого электропривода. Таким образом формируется сигнал управления электроприводом МЗАД, который в свою очередь управляет нагрузочным двигателем и соответственно технологическим процессом.
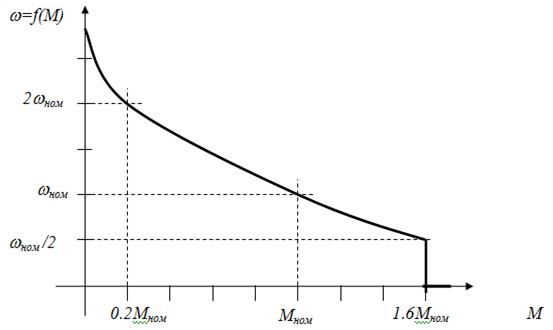
Рисунок 11 – Область существования механических характеристик нагрузочного электропривода: Мном – номинальный момент привода; wном – номинальная скорость;
К основным управляющим функциям относятся:
- стабилизация переменных технологического процесса на некоторых постоянных значениях, согласно ТП;
- изменение режима процесса (управление процессом) при регулировании задающего воздействия МЗАД;
- формирование и реализация управляющих воздействий, обеспечивающих достижение оптимального ТП;
- программно-логическое управление – автоматизированные пуск и останов технологического оборудования.
Точность управления является основным показателем качества технической реализации схемы технологического процесса. Чтобы добиться желаемого (оптимального) хода технологического процесса система управления должна выполнять с необходимой скоростью, следующие взаимосвязанные операции:
- фиксировать и анализировать информацию о состоянии процесса;
- регистрировать значения одних технологических переменных (момент, развиваемый на валу АД) и стабилизировать другие (скорость приводного двигателя);
1.6 Определение основных требований к ведению технологического процесса, формирование критерия качества и цели управления
Электромагнитный момент нагрузочного АД должен быть достаточен для гарантированного получения нагрузочных усилий, характерных для электропривода лифта. Развиваемый момент нагрузочного электропривода должен быть ограничен на уровне, предупреждающем поломку или деформацию места соединения валов нагрузочного и испытуемого электродвигателей:

где М – момент на валу нагрузочного электропривода,
МПУСК – момент трогания кабины лифта, обеспечивающий начало движения,
Мmax – максимально допустимый момент на валу электропривода, не приводящий к ухудшению эксплуатационных свойств стенда.
Погрешность регулирования по моменту и дискретность задания величины момента ограничения определяются паспортными данными на испытуемый электропривод. Согласно анализу паспортных данных на испытуемые электропривода лифтов, дискретность задания и погрешность регулирования составляет порядка 1%.
Развиваемая скорость вращения двигателя w должна быть достаточной для обеспечения заданного быстродействия системы. При подходе к точке останова скорость необходимо снижать в целях предупреждения аварийных ситуаций. В целях сохранения редуктора необходимо выбирать зазор при пуске.
Одним из факторов, влияющих на производительность, является напряжение сети. Просадки и перекосы 3-х фазной сети заведомо ограничивают мощность, поступающую в двигатель, и его перегрузочную способность.
2. Разработка и выбор элементов АСУ ТП
2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание
Другие рефераты на тему «Производство и технологии»:
- Люди. Техника. Изобретения
- Линия производства варенных колбас из мяса птицы с расчетом вакуумного шприца КОМПО-ОПТИ 2000-01
- Проект участка приготовления сахарного сиропа производственной мощностью 1500 тонн в год
- Обезжелезивание природных вод
- Изучение конструктивных особенностей реле и датчиков контроля
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды