Механизм поперечно-строгального станка
Введение
Поперечно-строгальный станок предназначен для строгания плоских поверхностей.
Привод станка состоит из простой зубчатой передачи и планетарной передачи, который соединен с электромотором.
Резание металла осуществляется резцом, установленным в резцовой головке, закреплённой на ползунке, при рабочем ходе ползунка.
Кривошип жёстко соединен с зубчатым колесом. Во время пе
ребега в конце холостого хода осуществляется перемещение стола с заготовкой на величину подачи с помощью храпового механизма и кулачкового механизма, кулачёк которого жестко соединен с зубчатым колесом.
При проектировании профиля кулачка необходимо обеспечить заданный закон движения толкателя.
1 Синтез и анализ рычажного механизма
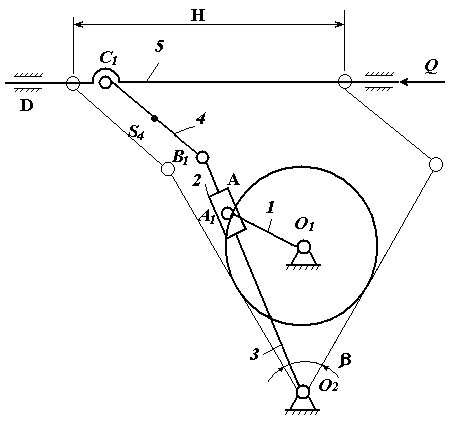
Исходные данные: lo1o2=460мм ; H=460мм ; nкр=70 мин-1 ; К=1,5;
1.1. Структурный анализ механизма :
Степень подвижности механизма:
![]() ;
;
где к=5 – число подвижных звеньев,
p1=7 – число одноподвижных кинематических пар,
p2=0 – число двухподвижных кинематических пар.
![]()
![]()
Разложение механизма на структурные группы Асура
Формула строения механизма:
I(0;1)→ II2(2;3)→II2(4;5)
Механизм II класса , второго порядка.
1.2. Определение недостающих размеров:
Угол размаха кулисы:
![]()
![]()
Длина кривошипа:
![]()
![]()
Длина кулисы:
![]()
![]()
![]()
![]()
Масштабный коэффициент построения схемы :
![]()
![]()
Строим 12 планов механизма , приняв за начало отсчета крайнее положение, соответствующее началу рабочего хода механизма.
1.3 Определение скоростей точек механизма.
Скорость точки А кривошипа определяем по формуле :
![]() ,
,
где ![]() , где nкр=70мин-1
, где nкр=70мин-1
![]()
![]()
Планы скоростей строим в масштабе :
![]()
![]()
Скорость точки А’ находим графически , решая совместно систему :
На плане Рvа’=30мм . Абсолютная величина скорости точки А’ :
![]()
![]()
![]()
![]()
Скорость точки В находим из соотношения :
![]() , откуда
, откуда ![]()
![]()
![]()
Абсолютная величина скорости точки В :
![]()
![]()
Скорость точки С определим, решая совместно систему :

На плане Рvс=34мм. Абсолютная величина скорости точки С :
![]()
![]()
![]() , на плане
, на плане ![]() =14мм
=14мм
![]()
Для всех остальных положений скорости определяем аналогично.
Полученные результаты сводим в таблицу 1.1
Таблица 1.1.- Значения скоростей
|
Скоростим/с |
Положения механизма | |||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 | |
|
va |
1.03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
1,03 |
|
va’ |
0,6 |
1,02 |
1,2 |
1,26 |
1,1 |
0,7 |
0.16 |
0,56 |
1.1 |
1,24 |
0,64 |
1,32 |
|
vb |
0,88 |
1,32 |
1,5 |
1,6 |
1,43 |
0,92 |
0,26 |
1,18 |
2,5 |
2,8 |
1,3 |
0 |
|
vc |
0,68 |
1,24 |
1,5 |
1,6 |
1,48 |
0,92 |
0,32 |
1,4 |
2,54 |
2,8 |
1 |
0 |
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды