Автоматизированная система управления автономным водоснабжением
1.3.4 Резервуары питьевой воды
В таблице 1.11 представлен перечень КИП на резервуарах питьевой воды.
Таблица 1.11 – Перечень КИП на резервуарах питьевой воды
|
Перечень КИП | ||
|
Наименование |
|
42-TK-N001B |
|
Реле низкого уровня в резервуаре питьевой воды |
LSLL-0903 |
LSLL-0923 |
|
Входной регулирующий клапан |
LV-0905 |
LV-0925 |
|
Датчик уровня резервуара питьевой воды |
LIT-0905 |
LIT-0925 |
|
Выходной изолирующий клапан |
XV-0910 |
XV-0920 |
Рассмотрим логику работы КИП резервуаров питьевой воды. При активации реле очень низкого уровня в резервуаре, LSLL-0903, пока выходной клапан резервуара открыт, XV-0910, блочная установка перекачки питьевой воды, PK-N520, отключена. Аварийный сигнал передается в систему SCADA. Отключение при очень низком уровне в резервуаре, LSLL-0903, блокируется, когда выходной изолирующий клапан резервуара, XV-0910, закрыт. Уровень в резервуаре питьевой воды передается системе SCADA и визуализируется на местном приборе. Дополнительные, регулируемые оператором, аварийные сигналы инициируются системой SCADA при следующих уставках: LAH-0905 - аварийный сигнал высокого уровня в резервуаре 4090 мм. Когда уровень в обоих резервуарах достигает уставки реле высокого уровня, LAH-0905 и LAH-0925, насосы промежуточной емкости необработанной воды, 42-PU-N001 A/B, отключаются. Уровень в резервуаре регулируется дифференциальным контроллером уровня, LIC-0905, воздействующим на входной регулирующий клапан, LV-0905. Регулирующий клапан полностью открыт, когда уровень < 90 %, и полностью закрыт, когда уровень > 95%.
Рассмотрим логику работы блочной насосной установки питьевой воды (PK-N520). Датчик давления передает значение давления в нагнетательном манифольде контроллеру регулируемой скорости. Когда давление в сети падает ниже уставки: насос №1 запускается со скоростью, совместимой с заданным потреблением и давлением. При увеличении потребления: насос №1 достигает 95 % своей максимальной скорости, а насос №2 запускается с минимальной частотой для немедленной готовности к работе по потребности. При увеличении потребления, насос №1 достигает 100 % своей скорости, а насос №2 работает по потребности. Когда потребление стабилизуется, и если насос №1 не достигает своей максимальной скорости за 15 секунд, насос №2 останавливается. Если потребление продолжает увеличиваться, насос №2 достигает 95 % своей максимальной скорости и тогда запускается насос №3 с минимальной частотой для немедленной готовности к работе по потребности. Если потребление продолжает увеличиваться, насос №2 достигает 100 % своей скорости, а насос №3 работает по потребности. Когда потребление стабилизуется, и если насос №2 не достигает своей максимальной скорости за 15 секунд, насос №3 останавливается. Для предотвращения работы всухую блочной насосной установки питьевой воды, она отключается при активации реле очень низкого уровня в рабочем резервуаре питьевой воды, когда выходной клапан соответствующего резервуара открыт. Блочная установка также отключается, когда выходные изолирующие клапаны, XV-0910 и XV-0920, обоих хранилищ питьевой воды закрыты. На рисунке 1.5 представлен алгоритм работы КИП резервуаров питьевой воды.
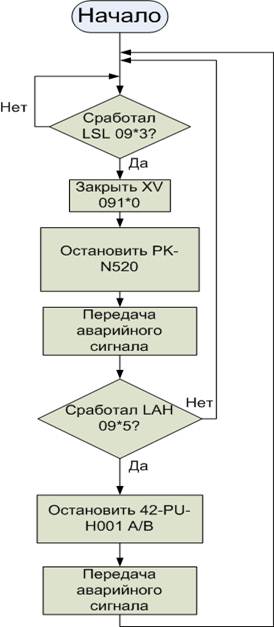
Рисунок 1.5 – Алгоритм работы КИП резервуаров питьевой воды
1.3.5 Программируемый логический контроллер
Насосы водяных скважин, блочная установка подготовки питьевой воды, а также исполнительные устройства и КИП резервуаров питьевой воды управляются выделенным ПЛК. Для реализации алгоритма управления использован программируемый логический контроллер ControlLogix фирмы Allen-Bradley. Данный ПЛК состоит как минимум из модуля процессора и модулей ввода/вывода в одном шасси ControlLogix с источником питания. Имеется возможность установки коммуникационного модуля на заднюю шину. В этом случае процессор контролирует как модули ввода/вывода в локальном шасси, так и дистанционно расположенные модули ввода/вывода. Для улучшения работы можно устанавливать несколько сетевых модулей на заднюю шину для обеспечения различных путей для передачи данных. Модульность этого ПЛК позволяет эффективно разрабатывать, комплектовать и модифицировать приложения со значительной экономией затрат на инжиниринг. Представим основные особенности программируемого логического контроллера ControlLogix:
· Полная совместимость с существующими системами на базе ПЛК, сетями и средствами операторского интерфейса.
· Возможность перестраивать и расширять систему с помощью модулей ввода/вывода и коммуникационных интерфейсов.
· Гибкая конфигурация системы.
· Замена любого модуля под напряжением без нарушения работы других модулей и без остановки работы системы.
· Доставка данных между звеньями сети, между сетями и между модулями осуществляется максимально быстро через заднюю шину.
· Высокая устойчивость аппаратной платформы к вибрациям, высокой температуре и элктрическим помехам в тяжелых промышленных условиях.
· Несколько процессорных модулей могут быть установлены на одной задней шине, обеспечивающей легкий доступ к данным одного процессора из другого для совместного использования значений ввода-/вывода и другой информации.
· Распределенная обработка при подключении процессоров к сетям EtherNet/IP, ControlNet.
· Процессоры могут адресовать большое количество входов/выходов (4000 аналоговых или максимум 128000 дискретных входов/выходов).
· Сообщения связи могут быть посланы и получены процессором как по сети EtherNet, ControlNet, так и по RS-232.
На рисунке 1.6 представлен программируемый логический контроллер ControlLogix:

Рисунок 1.6 – Программируемый логический контроллер ControlLogix
Рассмотрим структуру программируемого логического контроллера. Основой контроллера являются два взаимодействующих 32-хразрядных процессора: процессор логики и процессор задней шины. Процессор логики выполняет приложение и управляет процессом обмена сообщениями. Процессор задней шины общается с устройствами ввода/вывода, посылая и передавая данные по задней шине. Процессор задней шины работает независимо от процессора логики, то есть вся информация ввода/вывода передается асинхронно к исполняемой программе. Контроллер имеет память программ и память данных. Память пользователя имеет объем от 750 Кбайт до 8Мбайт. На рисунке 1.7 представлена структура программируемого логического контроллера ControlLogix.
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности