Автоматизированная система управления климатом в тепличных хозяйствах
![]() - электромеханическая постоянная времени.
- электромеханическая постоянная времени.
Рассчитаем коэффициенты цифрового ПИД - регулятора, управляющим пуском или остановом двигателя постоянного тока с конструктивными параметрами, аналогичными параметрам двигателя погружного насоса (таблица 11.1).
Таблица 11.1 – Паспортные данные двигателя постоянного тока
|
Характеристика |
Значение |
ед. изм. |
|
Номинальная мощность |
30 |
кВт |
|
Номинальное напряжение |
380 |
В |
|
Номинальный ток |
85 |
А |
|
Сопротивление обмотки якоря |
30 |
Ом |
|
Индуктивность обмотки якоря |
0,5 |
Гн |
|
Частота вращения |
152 |
рад/с |
|
Момент инерции |
0,3 |
кг/см2 |
|
Конструктивный параметр |
2,5 |
Вс |
|
Эм. постоянная времени |
6,5 |
Переход к передаточной функции приведенной непрерывной части двигателя осуществляется по следующей формуле:
![]() ,(11.7)
,(11.7)
где ![]() - исходная передаточная функция двигателя.
- исходная передаточная функция двигателя.
С учетом технических характеристик двигателя, его передаточные функции примут вид:
![]() ,(11.8)
,(11.8)
![]() .
.
Передаточная функция цифрового ПИД регулятора имеет следующий вид:
![]() ,(11.9)
,(11.9)
где ![]() - коэффициент усиления пропорциональной составляющей;
- коэффициент усиления пропорциональной составляющей;
![]() - коэффициент усиления интегральной составляющей;
- коэффициент усиления интегральной составляющей;
![]() - коэффициент усиления дифференциальной составляющей;
- коэффициент усиления дифференциальной составляющей;
![]() - период дискретизации (принимаем равным 0,2 с).
- период дискретизации (принимаем равным 0,2 с).
Интегральная составляющая определяется из следующего соотношения:
![]() ,(11.10)
,(11.10)
где ![]() - коэффициент добротности по скорости (выбирается произвольно в рамках от 1 до 10. В данном случае примем равным 1,2);
- коэффициент добротности по скорости (выбирается произвольно в рамках от 1 до 10. В данном случае примем равным 1,2);
![]() - передаточная функция скорректированной системы.
- передаточная функция скорректированной системы.
![]() ,(11.11)
,(11.11)
![]() .(11.12)
.(11.12)
Остальные коэффициенты усиления цифрового ПИД регулятора можно получить из следующей системы уравнений:
 , (11.13)
, (11.13)
где B и С – коэффициенты, выбираемые из ![]() .
.
Эта система, с учетом уже известных переменных может быть представлена в виде:
 , (11.14)
, (11.14)
откуда получаем ![]() ,
,![]() . Переходные характеристики двигателя без регулятора и с ним, представлены на рисунке 11.2. Окончательные значения коэффициентов усиления цифрового ПИД регулятора сведены в таблицу 11.2.
. Переходные характеристики двигателя без регулятора и с ним, представлены на рисунке 11.2. Окончательные значения коэффициентов усиления цифрового ПИД регулятора сведены в таблицу 11.2.
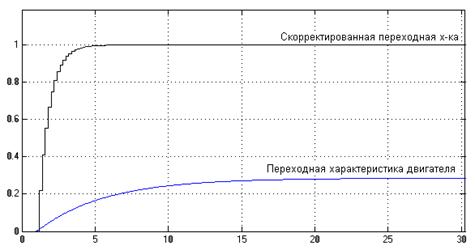
Рисунок 11.2 – Переходные характеристики двигателя с регулятором и без
Таблица 11.2 – Значения коэффициентов цифрового ПИД регулятора
|
Коэффициент |
Обозначение |
Рассчитанное знач. |
Результирующее знач. |
|
Пропорциональный |
Kp |
19,3852 |
19,3852 |
|
Интегральный |
Ku |
3,0023 |
0,30023 |
|
Дифференциальный |
Kd |
-0,56 |
-2,8 |
11.1 Расчет параметров узлов принципиальной схемы
Структурная схема цифрового ПИД регулятора содержит как минимум три усилителя (для реализации пропорционального, интегрального и дифференциального коэффициентов усиления), и два сумматора. Типовая схема усилителя представлена на рисунке 11.3, активные сопротивления резисторов – в таблице 11.3.
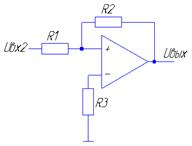
Рисунок 11.3 – Типовая схема усилителя
Коэффициент усиления можно рассчитать по следующей формуле:
![]() ,(11.15)
,(11.15)
здесь R3 используется для уменьшения дрейфа нуля, и принимается равным:
![]() .(11.16)
.(11.16)
Таблица 11.3 - Сопротивления резисторов усилителей
|
Элемент |
Коэффициент |
Сопротивление (КОм) |
В соответствии с рядом Е192 |
|
R1 |
Kp |
1 |
1 |
|
R2 |
Kp |
19,3852 |
19,3 |
|
R3 |
Kp |
0,95 |
0,96 |
|
R1 |
Ku |
1 |
1 |
|
R2 |
Ku |
0,3 |
0,301 |
|
R3 |
Ku |
0,231 |
0,232 |
|
R1 |
Kd |
1 |
1 |
|
R2 |
Kd |
2,8 |
2,8 |
|
R3 |
Kd |
0,736 |
0,732 |
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности