Автоматизированная система управления климатом в тепличных хозяйствах
9.9 Консольный насос К 200-150-250/4-5
Консольный насос представляет собой, с точки зрения гидравлики, характерный тип центробежного насоса, рабочим органом которого является центробежное колесо.
Центробежное колесо состоит из двух дисков, между которыми, соединяя их в единую конструкцию, находятся лопасти, плавно изогнутые в сторону, противоположную направлению вращения колеса
.
При вращении колеса на каждую частицу жидкости, находящуюся внутри колеса, действует центробежная сила, прямо пропорциональная расстоянию частицы от центра колеса и квадрату угловой скорости вращения колеса.
Под действием этой силы жидкость выбрасывается в напорный трубопровод из рабочего колеса, в результате чего в центре колеса создается разряжение, а переферийной его части - повышенное давление.
Движение жидкости по всасывающему трубопроводу происходит вследствие разности давлений над свободной поверхностью жидкости в приемном резервуаре и в центральной области колеса, где имеется разрежение.
В насосах типа К подвод крутящего момента от вала электродвигателя на вал насоса происходит через упругую муфту. В насосах типа КМ рабочее колесо установлено на конце удлиненного вала электродвигателя.
Назначение и технические характеристики насосных частей К и КМ идентичны, при этом насосные агрегаты типа КМ имеют меньшие габаритные размеры и массу.
Технические характеристики двигателя:
- мощность двигателя – 30 кВт;
- номинальная подача – 315 м3/ч;
- частота вращения – 1450 об/мин;
- номинальный напор – 20 м.
10. Выбор и описание контура регулирования
Схема используемого цифрового ПИД – регулятора представлена в соответствующем документе (структурная схема – на рисунке 10.1). На его вход подаются два сигнала: задающий, и сигнал обратной связи, приведенные к условному максимуму в 5 В. Для выделения ошибки, сигнал ОС предварительно инвертируется, после чего уже идет на сумматор. Ошибка проходит на три параллельно соединенных усилителя, отвечающих за отработку пропорционального, интегрального и дифференциального коэффициентов усиления.
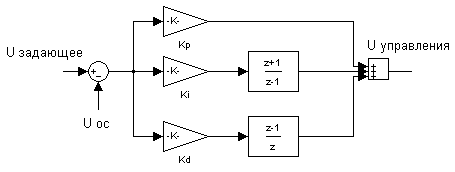
Рисунок 10.1 – Структурная схема цифрового ПИД – регулятора
Для реализации схем задержек типа ![]() и
и ![]() используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).
используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).
В качестве звена задержки используется интегральная микросхема, позволяющая задерживать аналоговый сигнал, дискретный, представляемый в последовательном или параллельном виде. Микросхема также позволяет программно менять время задержки.
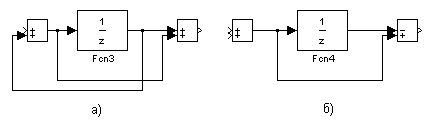
Рисунок 10.2 – Способы реализации передаточных функций звеньев задержки
Как видно, вся принципиальная схема строится на операционных усилителях (используются для реализации усилителей, сумматоров и инверторов), интегральных микросхемах задержки и резисторах.
На принципиальной электрической схеме также изображена схема дистанционного управления электроприводом регулирующего устройства (например, автоматического клапана, для отключения насосов от водопроводной сети).
Схема обеспечивает движение регулирующих устройств только во время подачи командных сигналов. Ограничение хода регулирующих устройств в конечных положениях обеспечивается соответствующими конечными выключателями.
Для предотвращения одновременного включения обеих катушек реверсивного магнитного пускателя, помимо механической блокировки, которой снабжен пускатель, в схеме предусмотрена электрическая блокировка с помощью размыкающих блок -контакторов ПМЗ и ПМО.
Электропривод снабжен потенциометрическим датчиком ПД, движок которого механически связан с редуктором привода. Датчик ПЛ подключается к устанавливаемому на щите управления блоку указателя положения БУП, состоящему из трансформатора питания, выпрямителей, подгоночного резистора и стрелочного прибора УП, шкала которого имеет градуировку 0 – 100%, пропорционально напряжению, снимаемому с потенциометрического датчика. Контакторы используются для отключения цепей управления при воздействии на привод ручным способом с помощью маховика.
11. Расчет параметров настройки контура регулирования
Поскольку вывод передаточной функции трехфазного двигателя достаточно громоздкий, предположим, что в погружных насосах скважин используются двигатели постоянного тока. Рассчитаем параметры цифрового ПИД - регулятора такого двигателя.
Двигатель постоянного тока как динамическая система описывается следующими уравнениями в операторной форме:
![]() , (11.1)
, (11.1)
где ![]() - напряжение питания двигателя;
- напряжение питания двигателя;
![]() - ток якоря;
- ток якоря;
![]() - активное сопротивление якоря;
- активное сопротивление якоря;
![]() - среднее значение ЭДС вращения;
- среднее значение ЭДС вращения;
![]() - индуктивность обмоток двигателя;
- индуктивность обмоток двигателя;
![]() - мощность двигателя.
- мощность двигателя.
![]() ,(11.2)
,(11.2)
![]() - коэффициент, зависящий от конструктивных параметров двигателя;
- коэффициент, зависящий от конструктивных параметров двигателя;
![]() - круговая частота вращения двигателя.
- круговая частота вращения двигателя.
Выражения для электромагнитного момента:
![]() ,(11.3)
,(11.3)
![]() ,(11.4)
,(11.4)
где ![]() - внешний момент, или момент нагрузки;
- внешний момент, или момент нагрузки;
![]() - момент инерции двигателя.
- момент инерции двигателя.
На основании этих уравнений может быть построена структурная схема двигателя как динамической системы (рисунок 11.1). Входным сигналом для этой системы является напряжение питания, выходным – круговая частота вращения двигателя. Дополнительное возмущение системы вноситься внешним моментом.
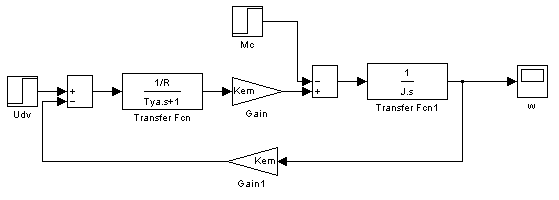
Рисунок 11.1 – Структурная схема двигателя
Из структурной схемы можно получить передаточные функции двигателя относительно круговой частоты вращения или тока:
![]() ,(11.5)
,(11.5)
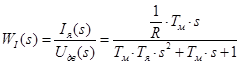 ,(11.6)
,(11.6)
где ![]() - коэффициент передачи;
- коэффициент передачи;
![]() - постоянная времени якоря;
- постоянная времени якоря;
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности