Исследование рычажного и зубчатого механизмов
Введение
Курсовая работа включает в себя исследование рычажного и зубчатого механизмов.
Исследование рычажного механизма составляет наибольший по объёму раздел курсовой работы по теории машин и механизмов. В работе рассматривается четырёхзвенный механизм со степенью подвижности равной единице и вращающимся входным звеном (кривошип). Выходным звеном является ползун.
Исследование ры
чажного механизма включает три этапа:
1. структурный анализ механизма.
2. кинематический анализ
3. анализ динамики установившегося движения
Синтез кинематической схемы механизма состоит в определении некоторых постоянных его параметров, удовлетворяющих заданным структурным, кинематическим и динамическим условиям, при этом одна часть этих параметров может быть задана, а другая должна быть определена.
Задачи:
1.Анализ строения механизма на уровне звеньев и кинематических пар и подсчет степени подвижности.
2. Анализ строения механизма на уровне структурных групп.
Исходные данные:
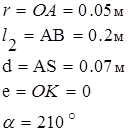
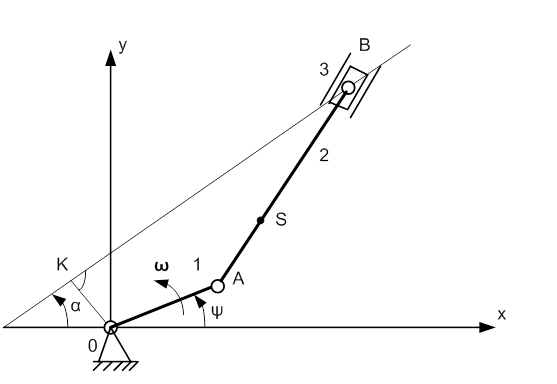
Рисунок 1 - Схема механизма
Допущения: При выполнении данного раздела курсовой работы воспользуемся рядом допущений:
1. Независимо от особенностей конструктивного выполнения, все шарнирные соединения считаем вращательными кинематическими парами, а все соединения, допускающие прямолинейное относительное движение – поступательными парами.
1.1.2 Анализ на уровне звеньев и кинематических пар. (Определяем общее количество звеньев и количество подвижных звеньев).
N=4 – количество звеньев;
n=3 - количество подвижных звеньев.
Определяем количество и виды кинематических пар.
Р5=4.
Таблица I - Таблица звеньев и кинематических пар механизма
|
№ пары |
Обозначение пары |
Название пары |
Класс пары |
Звенья |
|
1 |
O |
Вращательная |
5 |
0-стойка,1-кривошшип |
|
2 |
A |
Вращательная |
5 |
1-кривошшип,2-шатун |
|
3 |
B |
Вращательная |
5 |
2-шатун,3-ползун |
|
4 |
B1 |
Поступательная |
5 |
3-ползун,0-стойка |
Степень подвижности вычисляем по формуле Чебышева.
W=3n-2p5
W=3*3-2*4=1
Степень подвижности механизма равна 1, что свидетельствует о наличии только одного входного звена (звено 1). Если этому звену задать движение с некоторой угловой скоростью, то все остальные звенья механизма будут совершать строго определенные движения.
1.1.3 Структурный анализ на уровне групп Ассура
Исходный механизм I (0;1):n=1; р5=1
Определить степень подвижности W=3n-2p
W=3*1-2*1=1
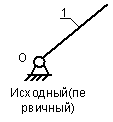
Рисунок 2- Исходный механизм
Вывод: Так как степень подвижности равна 1, следовательно, это исходный механизм.
Группа Ассура второго класса, второго вида II2 (2;3): n=2; p5=3.
Определить степень подвижности W=3n-2p
W=3*2-2*3=0
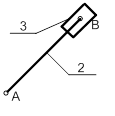
Рисунок 3- Группы Ассура
Вывод: Так как степень подвижности равна 0, следовательно, это группа Асура.![]() Формула механизма: I (0; 1) II2 (2; 3)
Формула механизма: I (0; 1) II2 (2; 3)
Вывод: Механизм является механизмом второго класса, так как наивысший класс группы Ассура равен II.
1.2 Кинематический анализ механизма (лист 1)
Задачи кинематики:
1. Задача положения состоит в определении функции положения;
2. Задача о скоростях, заключается в отыскании аналогов линейных и угловых скоростей;
3. Задача положения, аналога скорости и аналога ускорения центра масс каждого звена;
4. Задача углового положения, аналогов угловой скорости и углового ускорения звеньев;
5. Определение крайних положений механизма и величины хода выходного звена.
1.2.1 Анализ движения исходного механизма I (0,1)
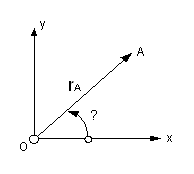
Рисунок 4-Входное звено
Принимаем угол Ψ = 30о
Ψ=30о=0.5235 рад
Cos 30=0.8660 рад
Sin 30=0.5 рад
Допущения:
1 Звенья механизма представляют собой абсолютно твердые тела.
2 Отсутствуют зазоры в кинематических парах.
Для решения задачи пользуемся методом векторных контуров. В этом методе связи в механизме, определяем как характером кинематических пар, так и размерами звеньев, выражаем в форме условий замкнутости векторных контуров, построенных на базе кинематической схемы механизма. В скалярной форме соответствующие зависимости получаем, проектируя контуры на оси координат.
Принимаем угол Ψ = 30о
 (1)
(1)
Аналоги скорости точки А:
 (2)
(2)
Аналоги ускорения точки А:
 (3)
(3)
1.2.2 Анализ группы Ассура II(2,3)
В данном подразделе определим зависимости ![]() и
и ![]() . Задачу решаем аналитически с использованием метода векторных контуров. Для получения зависимостей составляем векторные контуры. Углы отсчитываем от положительной оси Х против часовой стрелки, а для входного звена в направлении вращения.
. Задачу решаем аналитически с использованием метода векторных контуров. Для получения зависимостей составляем векторные контуры. Углы отсчитываем от положительной оси Х против часовой стрелки, а для входного звена в направлении вращения.
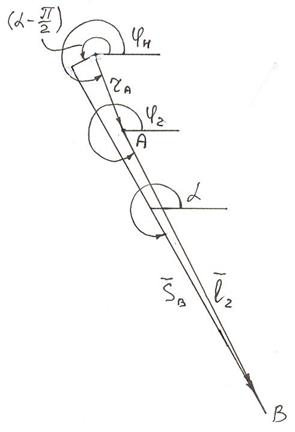
Рисунок 5 – Векторный контур ОАВК
Уравнение замкнутости векторного контура:
![]() (4
(4
Проецируем уравнение на оси системы координат:
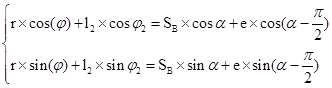 (5
(5
Умножить второе уравнение на ![]() , первое – на
, первое – на ![]() .
.
После вычитания первого уравнения из второго получим:
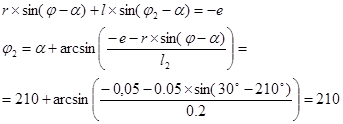 (6
(6