Система управления положением кресла водителя
4.1 Микроконтроллер
Реализация концепции RISC-архитектуры в 8-разрядных микроконтроллерах существенно расширила среду их применения. К традиционным приложениям таких микроконтроллеров (телекоммуникации, системы сбора данных, системы охраны, автоэлектроника, системы отображения информации и т. д.) сегодня прибавляются такие, где раньше использовались только более мощные 16– и 32–разря
дные процессоры с функцией цифровой обработки сигналов, например, обработка видеосигналов или управление электроприводом [16].
Компания ATMEL – один из мировых лидеров в производстве широкого спектра микросхем энергонезависимой памяти, FLASH-микроконтроллеров и микросхем программируемой логики, взяла старт по разработке RISC-микроконтроллеров в середине 90-х годов, используя все свои технические решения, накопленные к этому времени.
AVR-архитектура, объединяет мощный гарвардский RISC-процессор с раздельным доступом к памяти программ и данных, 32 регистра общего назначения, каждый из которых может работать как регистр- аккумулятор, и развитую систему команд фиксированной 16-бит длины. Большинство команд выполняются за один машинный такт с одновременным исполнением текущей и выборкой следующей команды. 32 регистра общего назначения образуют регистровый файл быстрого доступа, где каждый регистр напрямую связан с АЛУ. За один такт из регистрового файла выбираются два операнда, выполняется операция, и результат возвращается в регистровый файл. Все микроконтроллеры AVR имеют встроенную память программ с возможностью внутрисхемного программирования через последовательный интерфейс [17].
Для целей управления микроконтроллеры AVR делает привлекательным их хорошо развитая периферия, которая включает в себя: таймеры–счётчики, широтно-импульсные модуляторы, поддержку внешних прерываний, аналоговые компараторы, встроенный АЦП, параллельные порты ввода и вывода, интерфейсы, сторожевой таймер и устройство сброса по включению питания. Компания ATMEL предлагает бесплатную программную среду AVR-studio для отладки программ в режиме симуляции на программном отладчике, а также для работы непосредственно с внутрисхемным эмулятором.
Все эти качества превращают AVR-микроконтроллеры в мощный инструмент для построения современных, высокопроизводительных и экономичных контроллеров различного назначения.
В рамках единой базовой архитектуры AVR-микроконтроллеры подразделяются на три подсемейства:
- Classic AVR основная линия микроконтроллеров с производительностью отдельных модификаций до 16 MIPS;
- Mega AVR для сложных приложений, требующих большого объема памяти;
- tiny AVR низкостоимостные микроконтроллеры в 8-выводном исполнении [17].
Для выбора конкретного микроконтроллера из всего модельного ряда AVR проанализируем техническое задание и структурную схему. Микроконтроллер должен содержать: таймер; не менее 11 линий ввода-вывода.
Исходя из выше сказанного, и из стремления уменьшиться стоимость изделия, можно заключить, что в данной схеме подходящим для использования является микроконтроллер семейства Classic AVR, AT90S2313. Расположение его выводов изображено на рис. 6:
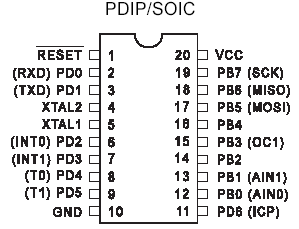
Рис. 6 Расположение выводов микроконтроллера AT90S2313
Перечислим его основные свойства:
- AVR® - высокая производительность и RISC архитектура с низким энергопотреблением
- 118 мощных инструкций - большинство из них выполняются за один такт
- 2 Кбайт Flash- памяти с поддержкой внутрисистемного программирования SPI- последовательный интерфейс для загрузки программного кода Ресурс: 1000 циклов записи/стирания
- 128 байта EEPROM: Ресурс: 100 000 циклов запись/ стирание
- Рабочие регистры общего назначения 32 х 8
- 15 программируемых линий I/O
- - питание VCC: от 2.7 В до 6.0 В;
- Полностью статический режим работы: От 0 до 10 МГц, при питании от 4.0 В до 6.0 В От 0 до 4 МГц, при питании от 2.7 В до 6.0 В
- Производительность, вплоть до 10 MIPS при 10 МГц
- Один 8-ми разрядный таймер/счетчик с отдельным предварительным делителем частоты
- Один 16-ти разрядный таймер/счетчик с отдельным предварительным делителем частоты с режимами сравнения и захвата
- Полнодуплексный UART
- Выбираемые 8, 9, или 10-ти разрядные режимы широтно-импульсной модуляции (ШИМ)
- Внешние и внутренние источники прерывания
- Программируемый следящий таймер с встроенным тактовым генератором
- Встроенный аналоговый компаратор
- Экономичные режимы ожидания и пониженного энергопотребления
- Программируемая блокировка для безопасности программного обеспечения
- 20 выводов
4.2 Канал 1
В данной части системы, отвечающей за пространственное положение кресла, главную роль играет микропроцессор. Сам Канал 1 представляет собой набор ключевых элементов. Первый ключ подключает дальнейшую часть схемы к питанию. В качестве такого ключа может использоваться оптореле, схема которого приведена рис. 7:
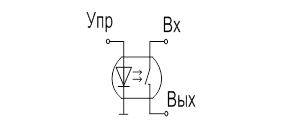
Рис. 7 Оптореле
Здесь Упр – управляющий сигнал с микроконтроллера, Вх – вход, т.е. напряжение питания, Вых – выход, точка подключения к дальнейшей части схемы. Через этот ключ в схему поступает «плюс» питания. «Минус» питания подключен постоянно. Использование оптореле удобно в смысле безопасности микроконтроллера, так как оно обеспечивает гальваническую развязку микроконтроллера со схемой.
После первого ключа в схеме идет инвертор, управляемый микроконтроллером. В качестве инвертора используется реле, у которого через нормально замкнутые контакты двигатели подключены в «прямом» направлении («прямое» направление выбрано условно). Следовательно, если необходимо что бы двигатели двигались в «прямом» направлении необходимо что бы питание реле было отключено, т.е. на линии микроконтроллера отвечающей за этот элемент был «0». Принципиальная схема инвертора изображена на рис.8.
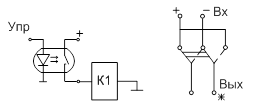
Рис. 8 Принципиальная схема инвертора
Здесь К1 – реле, Вх – вход данной части схемы, где «+» – выход предыдущего звена; Вых и Упр имеют тоже значение что и в предыдущей схеме. Значение символа «*» будет рассмотрено дальше. Как уже говорилось выше, применение инвертора связано с необходимостью менять направление вращения двигателей. Изменять направление движения можно, используя механические схемы. Однако такой способ будет более громоздким и дорогостоящим, а следовательно – нецелесообразным.
Дальше по схеме идут ключевые элементы, отвечающие за подключение нужного двигателя к схеме. Эта часть схемы необходима для подключения конкретного двигателя к питанию. Выбор двигателя осуществляется микроконтроллером, в соответствии с пришедшим сигналом с панели управления. Схема такого набора ключевых элементов приведена на рис. 9.
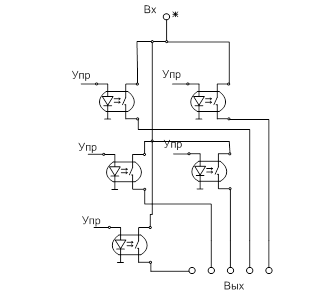
Рис. 9 Схема выходных ключевых элементов
Приведенная схема представляет собой набор оптореле.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск