Система управления положением кресла водителя
Как известно автомобиль в то время, когда он не движется, питается от аккумулятора, который имеет на выходе достаточно стабильное постоянное напряжение, в котором отсутствую переменные составляющие. Однако во время движения питание бортовой сети автомобиля переключается на генератор, который выдает не всегда стабильное напряжение и может иметь высокочувствительные пульсации. Подобные импульсы м
огут привести к нестабильной работе системы, а даже способны испортить элементы схемы, в частности микроконтроллер, замена которого потребует дополнительных затрат. Для того, что бы устранить подобные случаи, на входе системы необходимо использовать сглаживающие элементы, в частности фильтры нижних частот с достаточно узкой полосой пропускания.
При выполнении данной работы должна будет получена система управления, взаимодействующая с человеком. Эта система должна получать сигналы от пользователя (водителя), которые после обработки идут на исполнительные механизмы. Так же должны анализироваться сигналы, поступающие с датчиков, на систему, которые либо накладывают ограничения на работу системы, либо полностью определяют ее. Так как в проекте решаются две относительно не связанные задачи – изменение пространственного положения кресла и изменение его формы, всю систему можно разбить на две составляющие подсистемы. Управление обоими частями должно осуществляться одним элементом, в качестве которого выступает микроконтроллер. Микроконтроллер также связывает панель управления с системой.
2 Математическая модель
При выполнении данной работы должна быть получена система управления, взаимодействующая с человеком. Эта система должна получать сигналы от пользователя (водителя), которые после обработки идут на исполнительные механизмы. Так же должны анализироваться сигналы, поступающие с датчиков, на систему, которые либо накладывают ограничения на работу системы, либо полностью определяют ее. Так как в проекте решаются две относительно не связанные задачи – изменение пространственного положения кресла и изменение его формы, всю систему можно разбить на две составляющие подсистемы. Управление обоими частями должно осуществляться одним элементом, в качестве которого выступает микроконтроллер. Микроконтроллер также связывает панель управления с системой.
При работе на любую систему поступает ряд воздействий, часть из которых предусмотрена самой системой, как правило, контролируема и называется вектором входных воздействий, а часть является неконтролируемой, оказывая в основном вредные воздействия, с которыми необходимо бороться, такие воздействия называются возмущающими или помехой. Сама система, обработав входные воздействия, с учетом возмущения, формирует на выходе некоторый выходной сигнал.
При рассмотрении данной системы входным воздействием является сигнал, поступающий с панели управления. Этот сигнал представляет собой единичный скачок.
На выходе системы стоит двигатель, который осуществляет изменение пространственного положения сиденья, следовательно, именно с него наблюдается выходное воздействие, оказываемое на сиденье. Данное воздействие представляет собой угол поворота двигателя, который в случае спинки передается непосредственно на сиденье, либо преобразуется в поступательное движение подушки или подголовника.
Возмущающих воздействий в системе, как правило, много. Однако в данной системе можно выделить одно, наиболее значимое воздействие, оказываемое человеком, а именно его массой. Это воздействие представляет собой момент сопротивления создаваемый на валу двигателя, что может привести к замедлению скорости последнего вплоть до полной остановки.
2.1 Математическая модель двигателя постоянного тока (ДПТ)
Структурная схема двигателя постоянного тока представлена на рис. 3
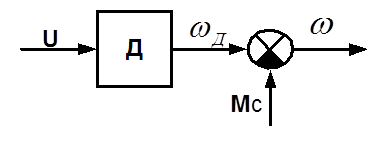
Рис. 3 Структурная схема ДПТ
На рис. 3 использованы следующие обозначения:
Д – двигатель
Мс – момент сопротивления, приложенный к валу двигателя
ωД - скорость вращения вала двигателя
ω – скорость вращения вала с учетом момента сопротивления
Расчётная схема двигателя постоянного тока независимого возбуждения (ДПТ НВ) представлена на рис. 4.
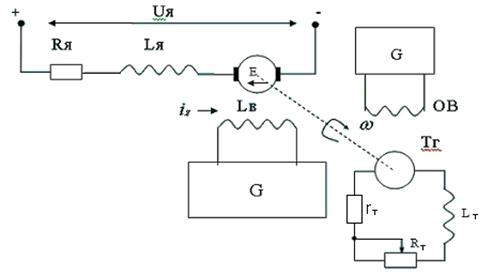
Рис. 4 Расчётная схема ДПТ
На рис. 4 использованы следующие обозначения:
- Lя – полная индуктивность цепи якоря ДПТ НВ, Гн;
- Rя – полное активное сопротивление цепи якоря, Ом;
- Е – ЭДС вращения якоря, В;
- ![]() – ток в цепи якоря, А;
– ток в цепи якоря, А;
- w – механическая угловая скорость, рад/с;
- Lн – полная индуктивность в цепи якоря тормоза, Гн;
- ![]() – полное активное сопротивление цепи нагрузки, Ом.
– полное активное сопротивление цепи нагрузки, Ом.
G – источник постоянного напряжения
Kн – коэффициент нагрузки
Фд – магнитный поток
Из литературы известно, что математическая модель ДПТ НВ имеет следующий вид:
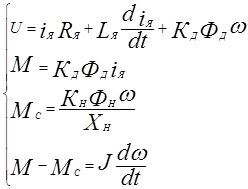
|
(2.1) (2.2) (2.3) (2.4) |
где, U – напряжение цепи якоря ДПТ НВ, В;
![]() – электромагнитный коэффициент двигателя;
– электромагнитный коэффициент двигателя;
М, Мс – соответственно момент развиваемый двигателем и момент статического сопротивления, развиваемый тормозом на валу двигателя, ![]() ;
;
J – момент инерции, ![]() ;
;
Хн – полное сопротивление цепи нагрузки, Ом.
![]()
Подставляя уравнения (2.2) и (2.3) в уравнение (2.4) получаем:
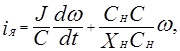
(2.5)
где, ![]() – электромагнитный коэффициент тормоза двигателя.
– электромагнитный коэффициент тормоза двигателя.
Продифференцируем данное уравнение и подставим его в уравнение (2.1):
 (2.6)
(2.6)
Приведём данное уравнение к стандартному виду
![]() следовательно:
следовательно:
|
(2.7) |
 ,
,
где,
![]()
откуда
|
(2.8) (2.9) |
![]()
 .
.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск