Управляемость автомобиля. Параметры маневра
ВВЕДЕНИЕ
Под управляемостью понимают способность автомобиля сохранять или изменять направление движения точно в соответствии с приложенными воздействиями. Для сохранения прямолинейного движения управляемые колеса автомобиля и ось подвески устанавливаются под некоторыми углами, что обеспечивает стабилизацию передних колес (возврат в нейтральное положение) при случайных отклонениях после вы
хода из поворота.
На управляемость автомобиля определенное влияние оказывают некоторые эксплуатационные факторы. Например, снижение давления воздуха в шинах высокого давления увеличивает угол увода, а в широкопрофильных — уменьшает. Радиальные шины лучше противостоят уводу, чем диагональные. Поэтому при установке, к примеру, сзади радиальных шин, а впереди диагональных недостаточная поворачиваемость автомобиля увеличивается, и наоборот.
Повышение нагрузки на ось уменьшает величину увода колес, поэтому опытные водители проходят поворот с небольшим ускорением. Это приводит к увеличению нагрузки на заднюю ось, повышается сцепление задних колес с дорогой, автомобиль более устойчив на поворотах. Тормозить же на повороте не следует, резко возрастает опасность заноса.
Под маневренностью понимается способность автомобиля выполнять разворот на возможно малой площади. Маневренность автомобиля зависит от его габаритных размеров, величины колесной базы, ширины колеи, предельных углов поворота передних колес. Основной параметр, характеризующий маневренность автомобиля — его минимальный радиус поворота. Легковые автомобили обладают лучшей маневренностью (радиус поворота меньше 6 м) по сравнению с грузовыми, и требуют гораздо меньше площади для маневрирования и разворотов. Автопоезда, наоборот, требуют больше места для маневрирования, чем одиночные автомобили.
1 УПРАВЛЯЕМОСТЬ
1.1 Поворот автомобиля
Управляемость автомобиля — одно из важнейших эксплуатационных свойств, определяющих возможность его безопасного движения с большими средними скоростями, особенно на дорогах с интенсивным движением.
Основными параметрами, характеризующими поворот автомобиля, являются радиус поворота и положение центра поворота.
На рисунке 1.1 представлена схема поворота автомобиля с жесткими и эластичными колесами. Точка О представляет собой центр поворота. Она находится на пересечении перпендикуляров, проведенных к векторам скоростей всех колес (мостов) автомобиля. Радиус поворота R (Rэ) представляет собой расстояние от центра поворота до продольной оси автомобиля. Для автомобиля с жесткими колесами (рисунок 1.1), у которого векторы скоростей колес совпадают с плоскостью их вращения, центр поворота лежит на продолжении оси задних колес, а радиус поворота (из ∆ОАБ)
![]() (1)
(1)
где L — база автомобиля; θ — угол поворота управляемых колес.
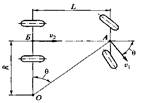
Рисунок 1.1 Схема поворота автомобиля с жесткими колесами:О — центр поворота; А, Б — центры осей передних и задних колес; v1, v2 — векторы скоростей передних и задних колес
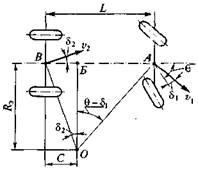
Рисунок 1.2. Схема поворота автомобиля с эластичными колесами:
О — центр поворота; А, В — центры осей передних и задних колес;
С — расстояние между центром В оси задних колес и точкой Б — проекцией центра поворота на продольную ось автомобиля; v1, v2 — векторы скоростей передних и задних колес
Следовательно, радиус поворота автомобиля R с жесткими колесами зависит только от угла поворота управляемых колес.
Для автомобиля с эластичными колесами (рисунок 1.2), векторы скоростей которых не совпадают с плоскостью их вращения, центр поворота находится на некотором расстоянии С от оси задних колес, а радиус поворота (из ∆ОАБ и ∆ОБВ)
![]() (2)
(2)
где δ1,δ2 — углы увода передних и задних колес (мостов).
Таким образом, радиус поворота автомобиля с эластичными колесами зависит от угла поворота управляемых колес и углов увода передних и задних колес, обусловленных их эластичностью при действии боковой силы.
С учетом радиуса поворота R3 находим расстояние С (из ∆ОБВ):
![]() (3)
(3)
Следовательно, положение центра поворота автомобиля с эластичными колесами зависит от угла поворота управляемых колес и углов увода передних и задних колес (мостов).
В технической характеристике автомобиля указывается наименьший радиус поворота по колее переднего наружного колеса. Этот радиус определяется экспериментально при максимальном повороте управляемых колес.
Радиус поворота автомобиля по колее переднего наружного колеса можно определить по следующей формуле:
![]() (4)
(4)
где В – колея передних колес[1].
1.2 Силы, действующие автомобиль при повороте
Процесс движения автомобиля на повороте включает в себя три фазы (рисунок 1.3, а): вход в поворот (участок АБ), поворот (БВ) и выход из него (ВГ).
При входе в поворот управляемые колеса двигавшегося прямолинейно автомобиля поворачиваются, и он движется по кривой уменьшающегося радиуса.
При повороте управляемые колеса повернуты на определенный угол, и движение происходит по кривой постоянного радиуса.
При выходе из поворота управляемые колеса возвращаются в нейтральное положение, и автомобиль движется по кривой увеличивающегося радиуса, а затем — прямолинейно.
Во время движения на повороте на автомобиль (рисунок 1.3, б) действуют следующие силы: центробежная рц и ее поперечная ру и продольная рх составляющие, а также поперечные реакции дороги: Ry1 — на передний и Ry2 — на задний мосты.
Основной действующей силой при повороте является поперечная составляющая ру центробежной силы, которая направлена перпендикулярно продольной оси автомобиля и представляет собой сумму трех сил:
![]() (5)
(5)
Сила P’у всегда возникает при криволинейном движении. Она пропорциональна квадрату скорости и действует в процессе всего поворота. Сила P’’у появляется в результате изменения угла поворота управляемых колес и действует при входе и выходе из поворота. Сила P’’’у возникает вследствие изменения скорости движения и действует только при неравномерном движении на повороте. Из трех указанных составляющих наибольшее значение имеет сила P’у, на долю которой приходится 90 % силы Pу. Поэтому для автомобилей общего назначения и специализированных автомобилей силами P’у и P’’у пренебрегают.
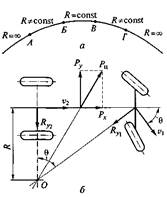
Рисунок 1.3. Поворот автомобиля:
а — фазы процесса попорота; б — силы, действующие при повороте;
А – Г — характерные точки траектории поворота автомобиля;
v1, v2 — векторы скоростей передних и задних колес
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск