Мехатронная система обеспечения заданной скорости электровоза на различных участках пути
- соедините шкаф МСУД1.2 и блоки БИ1.2 штатными кабелями и выполните проверку аппаратуры МСУД в объеме ТР, после чего установите двери шкафа и опломбируйте аппаратуру.
2.8.6 Замена отказавших ячеек и плат аппаратуры МСУД
должна производиться на обесточенной аппаратуре ячейками из состава ЗИП. После замены ячейки ЗИП не требуют дополнительной подс
тройки.
2.8.7 Восстановление элементов аппаратуры МСУД в пределах срока гарантии
осуществляется предприятием-изготовителем, для чего неисправные элементы должны быть отправлены изготовителю электровоза с описанием внешних признаков повреждения и причин, приведших к отказу. В случаях, если при эксплуатации были нарушены режимы применения аппаратуры, имеются механические повреждения или признаки воздействия на входы/выходы напряжений, превышающих допустимые значения, ремонт ячеек выполняется за счет потребителя.
2.8.8 Капитальный ремонт КР аппаратуры
производится по истечении срока службы (10 лет). Допускается продление срока службы аппаратуры после замены ячеек, содержащих комплектующие с истекшим сроком службы.
2.8.9 При проведении вышеуказанных работ, при необходимости переноски более двух ячеек пользоваться специальной тарой.
3 Выбор микроконтроллера
3.1 Общая характеристика
Семейство 16-разрядных микроконтроллеров Infineon (бывший Siemens Semiconductors) C166 содержит кристаллы с различным уровнем периферии и производительности, удовлетворяющие требованиям широкого спектра специфических приложений. Все члены семейства С161, С163, С164-CI, С165, 80С166, и C167 основываются на одной и той же базовой архитектуре и поддерживают единую систему команд (за исключением расширений для новых членов семейства). Это позволяет безболезненно переходить на следующий уровень производительности при реализации более сложного проекта.
Для нашей системы управления мы выбираем микроконтроллер 80С166, он удовлетворяет нашим требованиям, значительно превосходит микроконтроллер фирмы Octagon System 6010 и что не мало важно значительно дешевле. Внешний вид микроконтроллера Siemens 80C166 представлен на рисунке 3.1.

Рисунок 3.1 - Внешний вид микроконтроллера Siemens 80C166
§ Микроконтроллеры (МК) строятся по модульному принципу, предполагающему разделение на три основных системы: ядро центрального процессора, контроллер прерываний и периферийные модули. Обмен данными внутри кристалла организован при помощи четырех внутренних шин:
§ 32-разрядная шина к внутренней памяти программ, обеспечивает считывание двухсловных команд из встроенного ПЗУ за один цикл;
§ две 16-разрядные шины к встроенному двухпортовому регистровому ОЗУ, что позволяет одновременно производить запись и чтение данных;
§ 16-разрядная шина для обмена с периферийными модулями;
§ дополнительная 16-разрядная X-шина, являющаяся внутренним продолжением внешней системной шины, служит для подключения дополнительной памяти и новых периферийных модулей. На рисунке 3.2 представлена структурная схема микроконтроллера.
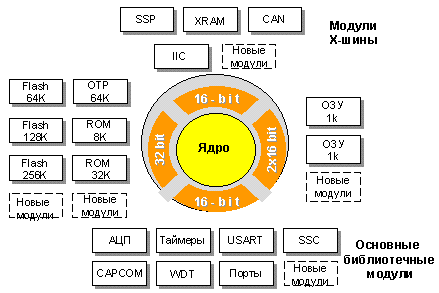
Рисунок 3.2 – Структурная схема МК
Эффективное программирование МК С166 достигается благодаря мощной системе команд, поддерживающей вычисления над 8-, 16- и 32-разрядными операндами, операции умножения и деления (MUL, DIV), контроль границ стека, управление периферией через регистры специальных функций Special Function Register (SFR). Следует также отметить высокую пропускную способность, мощную систему адресации и поддержку программирования на языке высокого уровня. При тактовой частоте процессора 16, 20 и 25 МГц цикл выполнения команды составляет 125,100 и 80нс соответственно.
Команды С166 можно разделить на следующие основные группы:
§ Преобразования данных: арифметические и логические команды, операции быстрого умножения/деления (0.5/1.0 мкс @ 20МГц), операции сдвигов на 1 .15 разрядов за 100 нс, операции с битами во встроенном ОЗУ и регистрах SFR.
§ Пересылки данных: команды MOV со всеми видами адресации, преобразование байта в слово, операции с системным стеком (PUSH, POP) с проверкой на переполнение и стеком пользователя (MOV с автоинкрементом и автодекрементом).
§ Управления программой: команды перехода и вызова и условные переходы по 16 различным условиям (при выполнении условия для перехода требуется только один дополнительный цикл), программные и аппаратные ловушки (Traps), быстрые контекстные переключения за 100 нс.
§ Специальные команды: сокращения энергопотребления и системного управления, непрерываемые последовательности команд, специальные приемы адресации.
3.2 Четырехступенчатый конвейер команд
§ Для увеличения скорости выполнения команд контроллеры семейства С166 содержат 4-х ступенчатый конвейер команд (рисунок 3.3). За один машинный цикл C166 на различных ступенях конвейера выполняет одновременно до 4 команд. Это означает, что обработка каждой команды по времени длится четыре машинных цикла, хотя выполнение команды происходит в течение одного цикла. Таким образом, конвейеризация имеет существенные преимущества для ускорения выполнения последовательности команд при достаточной пропускной способности шины. Время исполнения большинства команд составляет 100 нс при тактовой частоте 20МГц.
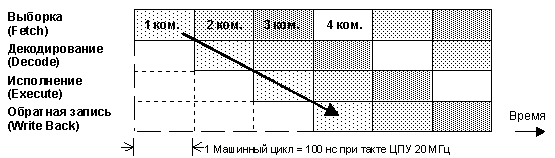
Рисунок 3.3 – Конвейер команд
§ Оптимизированная обработка команд перехода и вызова (Branch Instruction).
В то время как при выполнении обычных команд конвейер не вызывают проблем, команды перехода и вызова требуют выполнения специальных мероприятий. Ко времени достижения командой перехода или вызова фазы Execute следующая по адресу перехода команда только начинает исполнение фазы Fetch. Следовательно, команда, проходящая в конвейере на фазе Decode сразу вслед за командой перехода, должна игнорироваться. В данном случае вместо полного очищения конвейера используется переход с задержкой ("delayed branch"). Ситуация с условным переходом более сложная, т.к. неясно, будет ли следующая команда соответствовать результату проверки условия или нет. Поэтому при выполнении условия перехода вставляется холостая команда на фазе Decode и требуется дополнительный машинный цикл. Для ситуаций без перехода холостая команда не вставляется и один машинный цикл экономится. Таким образом, для команд Jump, Cond. Jump, Call, Return, . обычно требуется только один дополнительный машинный цикл для выборки команды из новой области памяти.
§ Обработка меток (Loop Control). Обычная задача в управляющих приложениях - просмотр таблиц, который состоит в повторном переходе по одному и тому же фиксированному адресу. Если в данном случае не предпринять специальных шагов, то при обработке каждой метки возникает бесполезный машинный цикл. Поэтому здесь осуществлен механизм кэширования (Jump Cache). При первичной обработке метки вставляется пустая команда и, как и раньше вхолостую тратится один машинный цикл. Однако адрес таблицы запоминается в кэш-памяти и при дальнейшем прохождении через метку адрес извлекается из кэш и вставляется непосредственно в фазу Decode. Таким образом, в данном случае переход осуществляется за один машинный цикл.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск