Основные технические и эксплуатационные требования к системе управления движением судов (САСУДС)
Бортовая станция управления движением - СУД (Maneuvering Control Station) служит для дистанционного управления судовыми силовыми средствами и для задания различных режимов управления движением судна. На ней сосредоточены органы для управления курсом, траекторией и скоростью судна.
СУД представляет собой пульт управления. Силовые средства, используемые при маневрах судна, и системы дистанц
ионного управления ими характеризуются в специальных курсах подготовки штурманского состава.
Состав.
На станции управления движением судна расположены:
Многофункциональный штурвал (или круглая поворотная рукоятка) для управления курсом;
Панель органов управления курсом и траекторией (Steering Controls);
Панель органов дистанционного управления пропульсивными устройствами (Main Engine and Thrusters Controls));
Дисплей для вождения судна (коннинг дисплей),
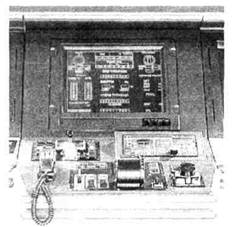
Рис.1. Внешний вид станции управления движением судна.
Когда судно полностью управляемо по всем горизонтальным степеням свободы на предельно малых скоростях хода и снабжено дистанционной автоматизированной системой управления позиционированием (маневровой системой), то на станции управления имеется дополнительно панель органов управления маневровой системы.
Состав органов управления на панелях станции зависит от конфигурации движительно-рулевого комплекса судна и типа систем для управления им.
Панель для управления курсом и траекторией.
На этой панели размещены органы, с помощью которых производится ручное управление судном по курсу, выбираются режимы управления курсом и траекторией судна, задаются параметры поворотов, производится настройка авторулевого.
Внешний вид панели управления курсом и траекторией СУД интегрированной системы ходового мостика фирмы "Praxix automation technology" (Голландия) представлен на рис 1.
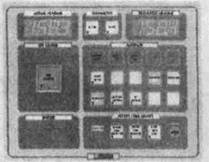
Рис.2. Панель управления курсом и траекторией.
Режимы управления курсом. Количество таких режимов зависит от типа установленного на судне авторулевого (АР).
Ручные режимы. Может быть два ручных режима для управления судном по курсу: "простой" и "следящий" или только один "следящий" режим.
Автоматические режимы управления курсом. Если на судне установлен неадаптивный АР, то автоматический режим один. Он обычно именуется - "Автомат" (Auto). В этом режиме, если не производится ручная настройка, коэффициенты закона регулирования остаются постоянными. Поэтому этот режим иногда называют "Auto-fixed".
Когда на судне адаптивный АР, то может быть несколько автоматических режимов управления курсом: один без адаптации "Auto-fixed" и два или три с адаптацией, отличающиеся используемым критерием оптимальности. Это может быть критерий безопасности, направленный на обеспечение максимальной точности регулирования, и экономичный - предусматривающий минимальный расход ресурсов. Первый из этих режимов часто называют "Стесненные воды" (Confined waters), второй - "Открытое море" (Open sea).
У некоторых адаптивных АР имеется и третий режим адаптации, специально для оптимизации управления в условиях шторма - "Штормовые условия" (Rough sea).
В режиме "Auto-fixed" авторулевой выполняет регулирование курса по неизменному закону с постоянными коэффициентами, некоторые из которых можно подстроить вручную.
В режимах адаптации при изменении внешних и внутренних условий работы авторулевой самостоятельно изменяет характер управления для обеспечения наилучшего по выбранному критерию качества управления. Адаптивные авторулевые обычно приспосабливаются к изменению загрузки, скорости судна, глубины на мелководье, к изменению степени волнения и характера рыскания.
Режимы управления движением но траектории.
Суда, на которых устанавливаются ИСМ, снабжаются системой автоматической вождения судна по заданной траектории - САВТ (Track Control System).
Со станции управления движением может устанавливаться ручной или автоматический режим проводки судна по траектории.
В автоматическом режиме САВТ сама без непосредственного участия человека проводит судно по запланированному пути, элементы которого должны храниться в памяти ИСМ. Автоматический режим часто именуют навигационным режимом (NAV). Для него могут использоваться и названия: "Track steering", "Track keeping", "Track auto". Некоторые САВТ дополнительно к названному имеют автоматический режим управления, обеспечивающий движение к заданной точке (Way point steering).
Регулировки для режима "Auto-fixed". В различных типах авторулевых при ручной настройке иа качественное управление регулируются разные параметры. Для настройки большинства находящихся в эксплуатации авторулевых используется - три-четыре регулировки. Встречаемые в АР виды регулировок приведены ниже.
Регулировка общего коэффициента усиления управляющего сигнала (кР). Такая регулировка называется "Руль" (Rudder). С ее помощью пропорционально изменяется величина вырабатываемого АР заданного значения перекладки руля Диапазон выбора кр обычно составляет 0.5…5.0.
Регулировка коэффициента усиления управляющего сигнала, пропорционального производной рыскания (кД). Регулировка кд определяет степень одерживания судна рулем. Чаще всего она называется "Коитрруль" (Counter rudder). Диапазон изменения значений кд лежит в пределах от 0 до 30. Для установки регулятора обычно используется шкала с условными делениями, от нуля до единицы, либо от нуля до десяти.
Регулировки для подстройки АР к работе при плохой погоде. Для этой цели может применяться регулировка зоны нечувствительности, либо регулировка скорости руля. Они предназначены для уменьшения частоты и величины перекладок руля при рыскании судна на волнении.
С помощью первого регулятора загрубляется работа авторулевого путем увеличения диапазона его нечувствительности в условиях волнения. Зона нечувствительности может выбираться в пределах 0°+3°. Этот регулятор называется "Рыскание-" (Yaw). В некоторых АР для него используется название "Погода" (Weather).
Регулятор "Скорость руля" (Rudder's rate) служит для снижения реакции авторулевого на волновое рыскание путем уменьшения скорости руля. С увеличением рыскания судна от волн скорость руля уменьшают.д.иапазон выбора регулируемого параметра обычно составляет 1.5+5.0 /с.
Регулировка "Рулевой предел" (Rudder limit) используется для ограничения максимального значения перекладок руля. Применяется она с целью избежания значительных углов крена при поворотах. Диапазон выбора ограничений обычно составляет 5°…35°.
Системы управления движением судов (СУДС) Транзас - современные автоматизированные системы, необходимые для повышения безопасности мореплавания, безопасности жизни на море и защиты окружающей среды от возможных негативных последствий судоходства, а также повышения эффективности навигации и грузоперевозок.
Другие рефераты на тему «Транспорт»:
- Перевозка подвижной техники судами морского флота
- Плавание во льдах
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Правила пассажирских перевозок и устройство пассажирских вагонов
- Разработка технологии технического обслуживания и ремонта силовых агрегатов, трансмиссии и ходовой части автомобиля
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск