Норберт Винер и кибернетика
1.3 Техническая кибернетика
ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА — направление (раздел) кибернетики, в котором на основе единых для кибернетики в целом научных идей и методом изучаются технические системы управления. Техническая кибернетика – современный этап развития теории и практики автоматического регулирования и управления, а также научная база для решения задач комплексной автоматизации про
изводства, транспортных и др. сложных систем управления. Сложные системы управления, в которых как непременный элемент принимает участие человек-оператор, называются автоматизированными системами, в отличие от систем автоматических, функционирующих без непосредственного участия в них человека. Проблема "человек — машина", в которой рассматриваются возможности рационального распределения функций между человеком и автоматически действующими устройствами,— одна из главных в технической кибернетике. Участие человека в управлении агрегатами и технологическими процессами, с одной стороны, и в административном управлении, с другой, также приводит к сращиванию этих двух сфер управленческой деятельности и к созданию единой человеко-машинной системы управления. Поэтому, кроме физиологических особенностей человека-оператора, существенное значение приобретает и его психологическое состояние. Главной задачей инженерной психологии является разработка методов использования знаний о поведении человека при проектировании и эксплуатации сложных человеко-машинных систем управления.
Большое значение в технической кибернетике приобретают методы решения задач, позволяющие преодолеть трудности, возникающие из-за наличия значительного числа взаимодействующих элементов (подсистем), входящих в соответствующую сложную систему.
Одним из самостоятельных направлений технической кибернетики является распознавание образов. Распознающие системы имеют большое научное и практическое значение, их применяют не только при создании читающих автоматов, но и при распознавании и анализе ситуаций, характеризующих состояние технологических процессов или физических экспериментов, а также при разработке медицинских автоматизированных диагностических устройств и т. д. Одним из самостоятельных направлений технической кибернетики является направление, связанное с разработкой систем автоматизированного проектирования (САПР) разного рода объектов и систем.
2. Взаимодействие управляемой и управляющей систем
Управление — функция системы, ориентированная либо на сохранение ее основного качества (т. е. совокупности свойств, утеря которых влечет разрушение системы) в условиях изменения среды, либо на выполнение некоторой программы, долженствующей обеспечить устойчивость функционирования, гомеостаз, достижение определенной цели. Понятие управления формализовано настолько, чтобы можно было дать его точное и при этом достаточно широкое определение; более того, всякое описательное определение управления неизбежно оперирует понятиями, общепринятые формализации которых не выработаны (система, среда, цель, программа и др.). Приведенное определение предусматривает два случая; первый из них имеет место в самоорганизующихся системах — биологических, социальных и социально-экономических; второй случай характерен для отдельных подсистем самоорганизующихся систем, а также для разнообразных технических устройств. При этом цель, в зависимости от трактовки соответствующего понятия, можно соотносить отдельным частным случаям управления либо считать неотъемлемым атрибутом управления вообще.
Систему, в которой реализуются функции управления, обычно называют системой управления и выделяют в ней две подсистемы: управляющую и управляемую. Управляющая система осуществляет функции управления, управляемая система является его объектом. Если управление осуществляется сознательно, то управляющая система создается субъектом управления, который формирует также цель (цели) управления. Иногда понятия субъект и цель управления трактуются шире: субъект управления отождествляется с управляющей системой (независимо от ее природы), а в качестве цели принимается выполнение программы управления. Разделение системы управления на управляющую и управляемую подсистемы не всегда можно произвести однозначно. В технических системах возникающие при этом трудности не имеют принципиального характера, а касаются лишь удобства описания (например, при телеуправлении размещаемые на объекте управления устройства приема и передачи информации можно относить как к нему самому, так и к управляющей системе).
Между управляющей и управляемой системами необходимы каналы связи. По каналу связи, ведущему к управляющей системе от управляемой, передается информация о состоянии последней, точнее, о текущих значениях существенных переменных объекта управления; по каналу связи противоположного направления передается управляющая информация (управляющие воздействия). Таким образом, управляющая и управляемая системы соединены контуром обратной связи. В некоторых случаях канал связи для передачи информации о состоянии объекта управления отсутствует (имеется лишь прямая связь); такие схемы управления весьма ограничены по возможностям и отличаются низкой надежностью. Простейшая схема управления с обратной связью изображена на рис. 1, где R — управляющая система, О — управляемая система (объект управления), Е — среда системы управления, d — канал передачи информации о состоянии объекта управления, f — канал передачи управляющей информации, i — воздействия среды на объект управления, а — выход объекта управления. Эта схема, в частности, адекватно описывает многочисленные механизмы регулирования и технических и биологических системах по принципу гомеостаза.
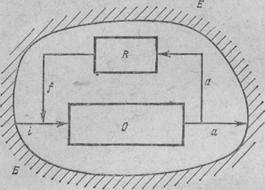
Рис. 1.
Состояние объекта управления в какой-либо момент времени здесь зависит от его предшествующих состояний, воздействий среды и управляющих воздействий, а состояние управляющей системы — от состояния объекта управления (и, возможно, ее собственных предшествующих состояний).
Механизмы регуляции по такой схеме в технических и биологических системах, как правило, действуют автоматически; при этом материальная субстанция, измерение которой дает информацию о состоянии объекта управления (давление пара, температура, электромагнитные характеристики и т. д.), используется в канале связи f как носитель этой информации. Для преобразования информации о состоянии в управляющую информацию управляющая система R соответственно изменяет величину сигнала, полученного по каналу f (см. Коэффициент обратной связи) или реализует трансформацию в качественно иной носитель (например, давление — в напряжение электрического тока). В данном частном случае — при автоматическом функционировании управляющей системы — ее обычно называют регулятором, хотя нередко эти два термина употребляются как синонимы.Важной отличительной особенностью сознательно управляемых социальных и экономических систем является обязательное наличие посредника в связях d и f, т. е. отсутствие автоматизма их функционирования. Это обусловливает многие специфические требования к организации систем социально-экономического управления, определению его качества, выдвигает проблему стимулирования.
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели