Расчёт закона управления продольным движением самолета
3.1.2. Рассчитать передаточные функции разомкнутой системы от управления u на входе привода до угла атаки ![]() , а также до сигналов перегрузки
, а также до сигналов перегрузки ![]() , и угловой скорости тангажа
, и угловой скорости тангажа ![]() . Определить полюсы и нули всех пе
. Определить полюсы и нули всех пе
редаточных функций.
3.1.3. Рассчитать логарифмические частотные характеристики, соответствующие п. 3.1.2 с учётом и без учёта динамики датчиков и рулевого привода.
3.1.4. Построить переходные характеристики, соответствующие п. 3.1.3, выбирая величину входного ступенчатого воздействия на входе привода такой, чтобы в установившемся режиме ny уст.=1 Оценить временные характеристики (перерегулирование, время регулирования, время нарастания). Провести сопоставительный анализ результатов выполнения п.п. 3.1.1 – 3.1.4.
3.1.5. Выбрать расчетную модель объекта управления, проводя, если это возможно, упрощения динамики самолета с приводами и датчиками. Выбрать желаемые собственные значения матриц динамики замкнутой непрерывной системы, учитывая заданные требования к временным характеристикам и необходимость использования по возможности небольших величин коэффициентов обратных связей.
3.2 Этап синтеза
3.2.1. Рассчитать обратную связь по полному вектору состояния и коэффициент передачи по внешнему управлению от датчика положения штурвала самолета.
3.2.2. Рассчитать переходные функции в линейной системе с обратной связью по полному вектору состояния, выбирая в качестве ступенчатого воздействия по координате Vp величину, соответствующую в установившемся режиме единичной перегрузке.
3.2.3. Выбрать параметры наблюдателя полного порядка.
3.2.4. Рассчитать переходные функции линейной системы с наблюдателем.
3.2.5. Синтезировать наблюдатель минимального порядка (аналогично п.п. 3.2.3 – 3.2.4).
3.2.6. Рассчитать переходные процессы в полной нелинейной системе с учетом всех нелинейностей рулевого привода и динамики датчиков.
3.2.7. Провести анализ возможности возникновения автоколебаний и определить их параметры методом гармонической линеаризации, учитывая только нелинейность золотника привода (с учетом динамики датчиков).
Если автоколебания превышают допустимый по техническому заданию уровень, то выработать рекомендации для уменьшения амплитуды автоколебаний.
3.2.8. В соответствии с правилами оформления студенческих работ [5] оформить пояснительную записку и подготовить 5‑минутный доклад для защиты работы в комиссии.
4. Рекомендации к выбору желаемых собственных значений
Одними из существенных достоинств методики модального синтеза являются простые связи между назначаемыми собственными значениями и векторами, и свойствами синтезируемой системы, позволяющие эффективно рассчитывать алгоритмы управления. Однако выбор желаемых собственных значений и векторов является наиболее трудным и ответственным моментом методики. Трудность выбора желаемых собственных значений и векторов обусловлена, как правило, противоречивостью и многообразием требований, предъявляемых к свойствам синтезируемой системы, а также необходимостью прибегать к численным расчетам.
Выбор желаемых значений и векторов представляет собой неформальную исследовательскую задачу, решением которой является обоснованный выбор совокупности этих значений.
В рамках курсовой работы предлагается рассчитать систему со скалярным (единственным) управлением. Известно, что при замыкании системы обратными связями по переменным состояния, передаточные функции разомкнутой и замкнутой систем имеют одинаковые (с точностью до постоянного множителя) числители, и, следовательно, одинаковые нули передаточных функций.
Введение наблюдателя в состав алгоритмов управления приводит к тому, что передаточные функции замкнутых систем не меняются по сравнению с аналогичными передаточными функциями систем с полным вектором обратной связи. Фактически это достигается тем, что желаемые собственные значения наблюдателей одновременно являются и нулями и полюсами передаточных функций замкнутых систем, и, следовательно, формально сокращаются. Однако следует помнить, что реально числовые данные параметров объекта известны приближенно, и в реальных условиях полюсы наблюдателя уже не будут компенсироваться соответствующими нулями, хотя величины нулей и полюсов могут быть близки друг к другу.
Таким образом, учет разбросов параметра ![]() в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.
в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.
В рамках курсовой работы для уменьшения общего объема работы рекомендуется выбирать желаемые собственные значения наблюдателя так, чтобы элементарные составляющие движений, обусловленные этими собственными значениями успокаивались несколько быстрее, чем результирующие переходные процессы.
Возвращаясь к замкнутой системе с полным вектором обратной связи, следует отметить, что предлагаемый объект управления имеет пару доминирующих комплексно-сопряженных полюсов в передаточной функции. Под доминирующими полюсами понимаются полюсы передаточных функций с существенно меньшими модулями вещественных частей по сравнению с другими полюсами. Поэтому оценку временны¢х характеристик переходных процессов можно проводить, только опираясь на характеристики элементарных составляющих переходных процессов, обусловленных доминирующими полюсами.
Поясним ситуацию на примере передаточной функции системы по перегрузке. Типичная картина расположения нулей и полюсов представлена на рис. 9.
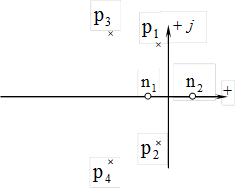
Рис. 9. Расположение нулей и полюсов передаточной разомкнутой системы по перегрузке:
p1, p2 – доминирующая пара полюсов объекта;
p3, p4 – полюсы передаточной функции привода;
n1, n2 – нули передаточной функции.
При рассмотрении переходной функции системы с передаточной функцией ![]() можно воспользоваться разложением
можно воспользоваться разложением ![]() на элементарные дроби:
на элементарные дроби:
 . (35)
. (35)
Предположим, что  (часто это условие выполняется, когда
(часто это условие выполняется, когда ![]() ). Тогда можно приближенно записать:
). Тогда можно приближенно записать:
 . (36)
. (36)
Коэффициенты C1, C2 являются комплексно-сопряженными, поскольку они соответствуют комплексно-сопряженным полюсам p1, p2 и являются, очевидно, вычетами функции ![]() .
.
Таким образом, составляющие переходных функций, соответствующие доминирующим полюсам, определяются с помощью временных характеристик звена второго порядка. Изучив связь между расположением на комплексной плоскости полюсов передаточной функции типового колебательного звена и его переходной функцией, можно целенаправленно назначать доминирующие желаемые полюсы передаточной функции (собственные числа матрицы динамики) замкнутой системы.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск