Расчёт закона управления продольным движением самолета
![]() , (26)
, (26)
![]() , (27)
, (27)
где ![]() – жесткость пружины, f – коэффициент демпфирования, получим
– жесткость пружины, f – коэффициент демпфирования, получим
![]() . (28)
. (28)
Полагая величину ht=23 src="images/referats/13267/image080.png">малой, пренебрегая величиной
![]() по сравнению с
по сравнению с ![]() , поскольку величина скорости вращения гироскопа велика, и введя обозначения
, поскольку величина скорости вращения гироскопа велика, и введя обозначения
 ,
,  ,
,  , (29)
, (29)
получим дифференциальное уравнение второго порядка
![]() . (30)
. (30)
Поскольку электрический сигнал с выхода потенциометрического датчика пропорционален углу ![]() , то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
, то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
 . (31)
. (31)
Значения параметров передаточной функции  ,
, ![]() с,
с, ![]() .
.
Для измерения нормальной перегрузки используем осевой акселерометр. Схема осевого акселерометра представлена на рис. 6.
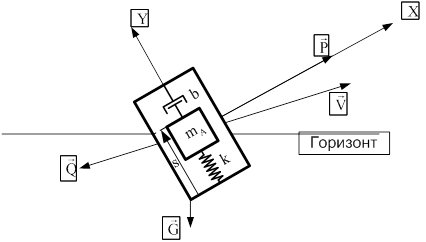
Рис. 6. Схема осевого акселерометра
Акселерометр, иначе называемый датчиком линейных ускорений (ДЛУ), во избежание зависимостей его показаний от угловых скоростей самолёта, устанавливается в центр тяжести самолёта. Его принципиальную схему можно представить в виде винтовой пружины k, один конец которой скреплен с корпусом прибора, а другой с массой ![]() , имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
, имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
Если самолёт, несущий ДЛУ, движется с ускорением, причём по оси чувствительности ДЛУ направлена составляющая ![]() этого ускорения, то сумма сил, действующих на массу
этого ускорения, то сумма сил, действующих на массу ![]() , равна
, равна
![]() , (32)
, (32)
или
![]() .*) (33)
.*) (33)
Здесь ![]() - жёсткость пружины,
- жёсткость пружины, ![]() - коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра
- коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра ![]() фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
 . (34)
. (34)
Значения параметров передаточной функции осевого акселерометра ![]() с,
с, ![]() ,
, ![]() В/ед.
В/ед.
1.7 Математическая модель датчика положения штурвала
Схема включения датчика положения штурвала летчика представлена на рис. 7. На схеме обозначены:
1 – штурвал;
2 – загрузочные пружины;
3 – потенциометрический датчик положения ручки.
Управлять самолетом, не ощущая усилий на ручке, ориентируясь только по ее положению, чрезвычайно трудно. Поэтому искусственно создают имитирующее усилие на штурвале управления с помощью загрузочных пружин.
Сигнал с выхода потенциометрического датчика пропорционален отклонению штурвала летчика. Для численных расчетов полагаем величину коэффициента пропорциональности между перемещением штурвала и выходным напряжением датчика равной 0,1 В/мм. Максимальные величины отклонения штурвала составляют ± 100 мм.
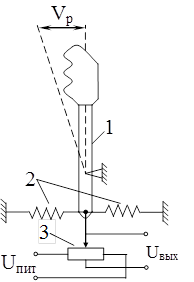
Рис. 7. Упрощенная схема штурвала летчика
2. Техническое задание на разработку алгоритма ручного управления продольным движением самолета
2.1 Общие положения
Требуется разработать алгоритм ручного управления продольным движением самолета для одного из режимов полета в соответствии с заданным номером варианта. Исходные данные для проектирования представлены в таблице 1.
2.2 Требования к статическим характеристикам
Расход штурвала летчика на единицу перегрузки должен быть не менее 40 мм и не более 60 мм.
2.3 Требования к динамическим характеристикам
При ступенчатом отклонении штурвала время регулирования по нормальной перегрузке не должно превышать 1,5 сек. при величине перерегулирования не более 10%. Переходный процесс по угловой скорости тангажа по времени регулирования не нормируется, но перерегулирование при ступенчатом отклонении штурвала не должно превышать 100%.
2.4 Требования к разбросам параметров
Динамические и статические характеристики системы управления должны удовлетворять сформулированным выше требованиям при неопределенности эффективности стабилизатора ![]() в пределах ±20%.
в пределах ±20%.
2.5 Дополнительные требования
Допускаются автоколебания по перегрузке с амплитудой не более 0,02.
3. План выполнения курсовой работы
Целью работы является расчет алгоритма управления продольным движением самолета, обеспечивающего выполнение требований к характеристикам системы управления, сформулированным в техническом задании. Функциональная схема проектируемой системы представлена на рис. 8.
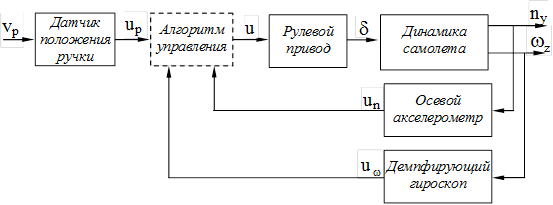
Рис. 8. Функциональная схема проектируемой системы управления.
В качестве инструмента расчётов рекомендуется использовать пакет MATLAB [6], [7]. Предлагается следующий план выполнения работы.
3.1 Этап анализа
3.1.1. Записать полную систему дифференциальных уравнений неизменяемой части системы с учётом динамики датчика угловых ускорений и акселерометра. Записать упрощенную полную систему дифференциальных уравнений неизменяемой части системы (разомкнутой системы) без учёта нелинейностей рулевого привода. Рассчитать собственные числа разомкнутой системы и установить принадлежность соответствующих собственных чисел собственно самолёту, рулевому приводу, каждому из датчиков.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск