Проектирование двигательной установки и элементов конструкции второй ступени баллистической ракеты с ЖРД
Основными способами управления вектором тяги для ЖРД имеющих одну камеру сгорания являются следующие:
1) Основная камера неподвижна, управляющее усилия создаются четырьмя поворотными двигателями (рис.2а) или поворотными соплами, установленными в шарнирных подвесах. В случае использования рулевых двигателей возможно применять для них собственный ТНА, в этом случае возможен раздельный запуск
основного и управляющих двигателей. К недостаткам можно отнести худшие массовые характеристики.
2) Основная камера неподвижна, вместо четырех камер используется две камеры (рис. 2б). В этом случае камеры качаются в двух плоскостях (камеры устанавливаются в карданном подвесе). Достоинством данной схемы является то, что сохраняется возможность управления при отказе одного из рулевых двигателей.
3)Основной двигатель расположен в карданном подвесе, следовательно камера качается в двух плоскостях создавая управляющие моменты по рысканью и тангажу. Для управления по крену применяются два качающихся в одной плоскости сопла (рис. 2в).
4) Основной двигатель расположен в карданном подвесе. Для управления по крену применяются управляющие сопла работающие на генераторном газе или двигатели ориентации (рис.2г).
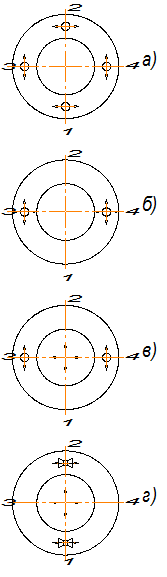
Рис. 1.2 Способы управления вектором тяги
Из представленных вариантов управления вектором тяги на мой взгляд наиболее удобно осуществлять вторым из представленных способов т. к. данная схема обладает большими по сравнению с другими схемами достоинствами.
1.5 Регулирование тяги двигательной установки по величине
Регулирование тяги ЖРД необходимо как для сохранения постоянства тяги при изменении условий работы двигательной установки, так и для изменения тяги с целью обеспечения заданного режима полёта ракеты.
Существуют следующие способы регулирования тяги:
1. Изменение отношения ![]() . Однако практически выполнить конструкцию, позволяющую изменять
. Однако практически выполнить конструкцию, позволяющую изменять ![]() , сложно.
, сложно.
2. Изменение площади критического сечения ![]() :
:
а) размещение в критическом сечении профилированной иглы (рис. 3). При этом обеспечивается возможность большого диапазона изменения тяги. Главный недостаток этого способа – значительное усложнение конструкции, в первую очередь, из-за трудности охлаждения подвижной иглы.
б) впрыском рабочего тела выше по потоку (метод вихревого клапана).

Рис. 1.3. Схема изменения ![]() профилированной иглой: 1 – игла, 2 – уплотнение иглы
профилированной иглой: 1 – игла, 2 – уплотнение иглы
Данные способы регулирования тяги сложны, и ведут к изменению рабочих параметров КС (рост давления, уменьшение перепада давления на форсунках и т.д.) поэтому практически не применяются.
3. Изменение давления в КС ![]() путём изменения расхода компонентов (табл. 1.1). Это наиболее распространённый способ, который даёт возможность регулировать тягу в широком диапазоне изменений в 3 – 5 раз.
путём изменения расхода компонентов (табл. 1.1). Это наиболее распространённый способ, который даёт возможность регулировать тягу в широком диапазоне изменений в 3 – 5 раз.
Таблица №1.1
Способы регулирования тяги путём изменения давления в камере сгорания
|
Способы регулирования |
Особенности способа регулирования |
|
1. Изменение числа оборотов ТНА: а) изменение расхода рабочего тела на турбину при постоянной температуре б) изменение температуры рабочего тела путём изменения соотношения расходов компонентов |
Реагирование быстрое. Изменение тяги до 10…15 %. Ухудшение рабочих характеристик ДУ вследствие работы ТНА на нерасчётных режимах. Способ а) более приемлем при открытой схеме, способ б) – при замкнутой |
|
2. Дросселирование расхода компонентов в камеру сгорания |
Реагирование быстрое. Возможно и при вытеснительной подаче и при подаче с ТНА. В первом случае лишнее давление в баках, т.е. лишняя масса. Во втором случае – непроизводительная затрата мощности ТНА |
|
3. Отключение части форсунок |
Аналогично п. 2. Возникает опасность прогара головки |
|
4. Изменение перепада давления на форсунках |
Аналогично п. 2 |
|
5. Закольцовка части расхода компонентов |
Реагирование быстрое. Лишняя затрата мощности ТНА для прокачки закольцованного компонента |
|
6. Изменение давления в баках при вытеснительной подаче |
Очень медленный процесс. Необходимо изменять давление наддува баков. Лишний запас прочности баков, т.е. лишняя масса |
|
7. Изменение соотношения компонентов, подаваемых в камеру сгорания |
Реагирование быстрое. Ухудшение рабочих характеристик камеры сгорания |
Принимая во внимание достоинства и недостатки указанных способов, а также учитывая схему ЖРД, для регулирования тяги ДУ по величине будем изменять число оборотов ТНА за счёт варьирования расхода рабочего тела на турбину при постоянной температуре
Схема крепления ЖРД на ракете
Для того, чтобы передать силу тяги ДУ на корпус ракеты используют различные конструктивные схемы крепления двигателя (рис. 4).
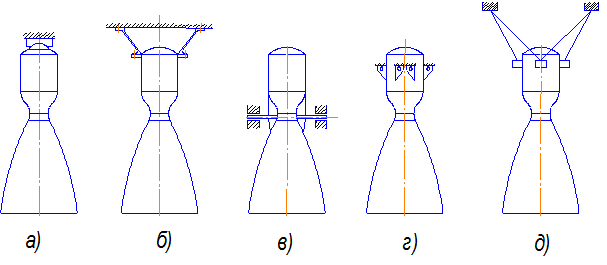
Рис. 1.4 Некоторые конструктивные схемы крепления двигателя: а, в – поворотные двигатели; б – крепление с помощью конической оболочки; г – крепление кронштейнами; д – крепление в виде фермы.
Передачу силы тяги от ДУ на корпус ракеты будем осуществлять с помощью конической оболочки, которой является нижнее днище бака горючего. Все остальные агрегаты будут крепится к камере сгорания.
1.6 Размещение ТНА на ДУ
При размещении ТНА, помимо компактности, с целью уменьшения габаритов и массы всей установки, необходимо по возможности обеспечить наиболее прямой путь топлива от баков к насосам (для уменьшения потерь давления), удобный подвод рабочего тела к турбине и отвод газов от неё. Кроме того, следует учитывать возникновение при работе ТНА крутящего момента, сообщаемого ракете, что может потребовать дополнительной компенсации.
Так как проектируемый двигатель имеет одну камеру сгорания, то в хвостовой части УБР остается достаточно пространства для размещения ТНА сбоку от камеры сгорания на самой камере.
На рис. 6 приведены возможные схемы совместной компоновки ТНА и камеры двигателя.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды