Разработка технологии получения электронных крупномасштабных планов
Нахождение матрицы перехода T.
Для нахождения матрицы перехода нужно рассмотреть систему двух уравнений:
![]() (5)
(5)
![]()
Второе уравнение получается из предположения ортонормированности матрицы перехода T (т. к. системы координат, как тахеометра, так и лазерно
го локатора, прямоугольны).
Расписывая эти две формулы, получаем систему уравнений с 9-ю неизвестными – матрицей перехода от 1-й системы координат ко 2-й:
 (6)
(6)
Складывая по 3 уравнения, получаем следующую систему уравнений:
 (7)
(7)
Получив такие системы уравнений для каждой пары точек, можно получить переопределенную систему уравнений с девятью неизвестными – и, соответственно, найти решение данной системы.
Нахождение постоянной, отражающей сдвиг начала координат первой системы координат относительно второй
Для нахождения последней из неизвестных нужно вычесть из координат точек целей, полученных тахеометром, координаты, полученные ЛЛ, после поворота их по вычисленной матрице перехода.
![]() (8)
(8)
Эту операцию следует провести для всех точек и найти среднее значение всех полученных результатов.
 (9)
(9)
После нахождения всех неизвестных параметров становится возможным привести измерения лазерного сканера в систему координат тахеометра, найти и проанализировать отклонения в измерениях координат марок (рис.4).
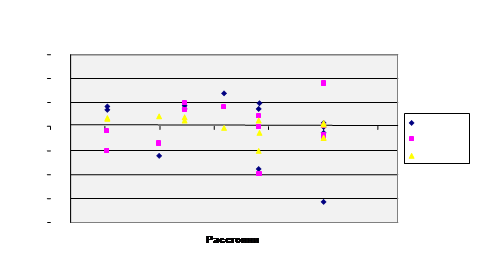
Рис.4. График ошибок измерения координат НЛС, в зависимости от расстояния до марок.
Как видно из полученных отклонений, обнаруживаются некоторые постоянные ошибки измерений НЛС. Для их исправления необходимо найти корректирующие коэффициенты. Для нахождения корректирующих данных необходимо сравнить координаты марок, измеренные сканером, и координаты марок, измеренные тахеометром, приведенные в систему координат НЛС.
Из анализа принципа действия сканеров видно, что метрические характеристики изображений, получаемых с помощью НЛС, зависят от погрешностей измерения углов и расстояний. Углы измеряются одним инструментальным способом, поэтому координаты по осям X и Z, которые получаются угломером, будем считать связанными. Координаты по оси Y не зависят от координат по оси X и Z, т. к. они получаются путем измерения расстояния до точки лазерным дальномером.
Установлено, что для качественных коэффициентов преобразования для осей X и Z достаточно полинома 2-го порядка (9,10).
∆Xi = Xi’-Xi~ = a0 + a11X + a12 Z + a21X2 + a22XZ + a23 Z2 (10)
∆Zi = Zi’-Zi~ = b0 + b11Z + b12 X + b21Z2 + b22XZ + b23 X2 (11)
Для калибровки дальномерных измерений по оси Y необходим полином более высокой, 3-ей степени. Для его нахождения достаточно 4-х координат.
∆Yi = Yi’-Yi~ = c0 + c1Y + c2Y2 +c3Y3 (12)
При решении систем уравнений получаются коэффициенты, позволяющие вводить поправку в координаты точек, получаемые непосредственно с НЛС. Сравнение откорректированных значений координат с исходными в проводимом эксперименте показало разницу до 2 мм, что позволяет рекомендовать применение данного математического механизма на практике при необходимости высокоточных измерений.
Для автоматизации анализа использовалась созданная программа ”L_tochnost” (рис.5). В ней определяются параметры связи двух пространственных систем координат - сканера и тахеометра - по файлам, содержащим измерения координат марок. Программа определяет уклонения координат сканера от рассчитанных по найденным параметрам, считает корректировочные коэффициенты для данных НЛС и пересчитывает исходные данные.
При вводе данных в программу, помимо файлов с координатами мишеней, необходимо указывать следующие параметры:
Разделитель точек (Point Separator) – символ, разделяющий координаты точек;
Десятичный разделитель (Decimal Separator) – символ, разделяющий целую и дробную часть;
Так же в программе есть дополнительные настройки, созданные для облегчения восприятия получаемой информации:
Единицы измерений – в каких единицах будет показываться получаемое расстояние между точками;
Ошибка – в каких единицах будет показывать разность расстояний.
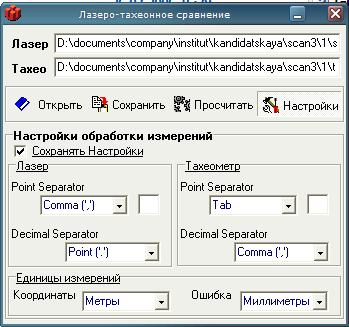
Рис.5 Окно программы ” L_tochnost”
Вышеописанная технология определения ошибок и корректировки измерений позволяет узнавать истинную точность измерений каждого отдельно взятого НЛС и определяет возможность использования того или иного сканера для получения данных для создания планов требуемого масштаба. Период времени между требуемыми проверками НЛС зависит от многих факторов (интенсивности использования НЛС, видов транспортировки, ее дальности и т.п.).
После нахождения корректирующих коэффициентов можно приступать непосредственно к съемке объекта. До начала съемки необходимо продумать такое расположение точек стояния лазерного сканера, чтобы соседние сканы перекрывались на площади не менее нескольких метров, и расположить в местах перекрытия специальные марки, которые позволят сшить сканы с максимальной точностью. Если результаты работы необходимо представить в единой геодезической системе координат, то желательно определить геодезические координаты этих марок с помощью GPS или других приборов.
Основные условия размещения марок:
• количество марок для каждой пары соседних сканов должно быть не менее трёх;
• марки не должны лежать в одной плоскости;
Также существует особенность установки лазерного локатора, связанная с его устройством.Т. к. дальномерный узел по своим характеристикам точнее угломерного, то и располагать сканер следует под как можно большим углом к поверхности сканируемого объекта. Этим будет снижено влияние угломерной части.
С целью обеспечения наиболее высокой точности сканирования необходимо выполнить прогрев лазерного сканера в течение времени, установленного производителем, который позволит вывести сканер на максимально стабильный режим работы, и ввести параметры атмосферы (температуру и давление).
Процесс сканирования никаких сложностей не представляет и зависит только от используемого программного обеспечения. Но в любом случае на экране портативного компьютера нужно выделить тем или иным способом область сканирования на предварительно получаемом с помощью фото - или видеокамеры, входящей в состав НЛС, изображении, указать параметры сканирования и запустить процесс съемки.
Плотность точек на поверхности снимаемого объекта определяется следующими параметрами сканирования: задаваемым количеством измеряемых точек и расстоянием до объекта.
В результате съемки лазерным сканером получается несколько облаков точек. Для того чтобы измерить сложный инженерный объект полностью, его нужно отсканировать со всех сторон. После уравнивания (объединения) всех облаков точек в единое геометрическое пространство получается единое описание объекта съемки.
Другие рефераты на тему «Геология, гидрология и геодезия»:
Поиск рефератов
Последние рефераты раздела
- Анализ условий формирования и расчет основных статистических характеристик стока реки Кегеты
- Геодезический чертеж. Теодолит
- Геодезические методы анализа высотных и плановых деформаций инженерных сооружений
- Асбест
- Балтийско-Польский артезианский бассейн
- Безамбарное бурение
- Бурение нефтяных и газовых скважин