Разработка технологии получения электронных крупномасштабных планов
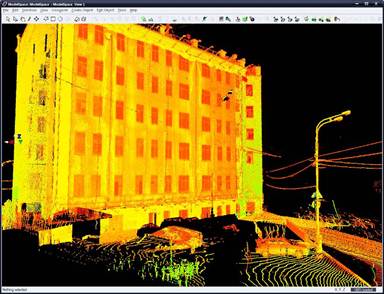
Рис.1 Облако точек.
Основной формой представления результатов наземного лазерного сканирования является массив (облако) точек (рис.1) лазерных отражений от объектов, находящихся в поле зрения сканера, со следующими характеристиками - пространственными координатами (X, Y, Z), интенсивностью и реальным цветом.
Большой
объем получаемой информации не гарантирует ее высокую точность. Проверить достоверность измерений наземного лазерного сканера с помощью существующих методик исследования угловых и линейных точностей, применимых для классических геодезических приборов, не представляется возможным из-за особенностей конструкции НЛС, поскольку у сканера отсутствует зрительная труба или какое-либо другое устройство наведения. Нет у НЛС и устройства центрирования, отсутствует уровень - обязательный атрибут практически любого геодезического инструмента. На его корпусе нет метки, до которой возможно измерять высоту инструмента. Перечисленные особенности, относящиеся к категории конструктивных, не позволяют произвести проверку дальномера сканера на эталонированном базисе. Другая особенность сканера, относящаяся уже к категории технологических, не даст проконтролировать углы. НЛС сразу выдает окончательные результаты в виде трехмерных координат точек.
Для проверки точности данных, получаемых с наземного лазерного локатора, предложена методика, основанная на сравнении значений координат неких эталонных точек с точками, выдаваемыми сканером. Проблема измерения НЛС требуемой точки решается с помощью использования специальных светоотражающих мишеней. Методика основана на проведении эксперимента.
Сущность эксперимента заключается в следующем: в лабораторном помещении на разных высотах и удалении от НЛС размещаются и закрепляются специальные мишени (марки) (рис.2). Такие марки специализированы для каждого производителя, сделаны на основе маленького отражателя с известными характеристиками, и позволяют НЛС наводиться на центр марки с точностью 0.1 мм. Расстояние от сканера до мишеней должно достигать максимально возможного расстояния, при котором изготовителем сканера гарантируется точность измерений или до которого планируется проводить измерения при полевых работах. Для определения координат центров мишеней следует использовать предварительно поверенный тахеометр заведомо более высокой, нежели у НЛС, точности.
Сканирование следует выполнять таким образом, чтобы все марки вошли в один скан. Это необходимо для избежание влияния механизма поворота головки сканера на точность получения координат центров марок.
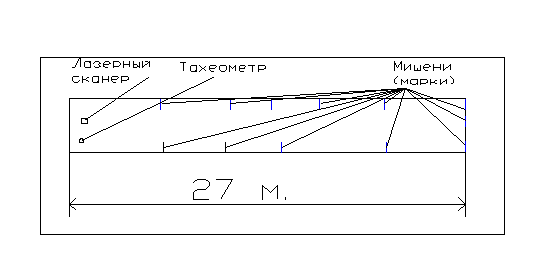
Рис.2 Схема лаборатории для проверки точности НЛС.
В работе предложена и апробирована следующая технология. Сначала полученные координаты измеренных точек выводятся из приборов в текстовые файлы через специальные программы, распространяемые совместно с оборудованием. Затем структура данных в файле с координатами, полученными с тахеометра, приводится в соответствие со структурой данных в файле, получаемых с лазерного локатора, а именно меняется направление и порядок осей координат прибора.
Увидеть ошибки измерений ЛЛ, просто сравнивая полученные файлы, нельзя, т. к. начальные координаты и направления осей измерений у тахеометра и лазерного сканера не совпадают, а соответственно не совпадают и получаемые измерения. Первоначальный вывод о точности измерения НЛС можно получить, сравнивая и анализируя расстояния между всеми парами точек, измеренных тахеометром и сканером соответственно.
Расстояние между двумя точками с координатами (x1,y1,z1) и (x2,y2,z2) определяется по формуле:
![]() (1)
(1)
При проверке по описанной методике лазерного сканера HDS-2500 с. н.336 был получен следующий график расхождения длин отрезков, соединяющих все пары центров измеренных марок:
|
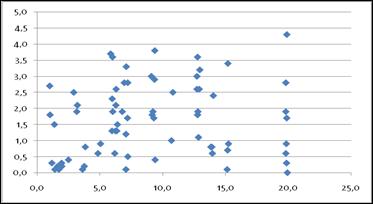
Рис.3 График расхождения длин отрезков, соединяющих все пары центров марок, измеренных НЛС, в зависимости от расстояния до измеряемого объекта
Полученные результаты позволяют сделать 2 вывода:
величина ошибок измерения зависит не только от расстояния до объекта (при съемках в пределах расстояний, указанных производителем НЛС);
максимальные ошибки измерений не превышают заявленной производителем точности (6мм) для безотражательных измерений.
Для подробной информации об ошибках определения координат точек НЛС необходимо проанализировать непосредственно координаты, полученные с тахеометра, и координаты точек скана, приведенные в единую пространственную систему координат.
Для приведения координат мишеней, полученных в результате измерений с помощью лазерного сканера в систему координат тахеометра, использовалась наиболее общая формула перевода точек из одной системы координат в другую.
![]() , где (2)
, где (2)
![]() - координаты точки в системе координат тахеометра,
- координаты точки в системе координат тахеометра,
![]() - координаты точки в системе координат лазерного локатора,
- координаты точки в системе координат лазерного локатора,
![]() - коэффициент масштабирования системы координат тахеометра относительно системы координат лазерного локатора,
- коэффициент масштабирования системы координат тахеометра относительно системы координат лазерного локатора,
![]() - матрица перехода от одной системы координат к другой,
- матрица перехода от одной системы координат к другой,
![]() - постоянная, отражающая сдвиг начала координат первой системы координат относительно второй.
- постоянная, отражающая сдвиг начала координат первой системы координат относительно второй.
Как видно из вышеприведенной формулы, для правильного перехода из системы координат тахеометра в систему координат сканера и наоборот необходимо знать 3 параметра. Нахождение этих коэффициентов делится на несколько этапов:
Рассматривая разность координат двух точек в обеих системах координат находится коэффициент масштабирования системы координат тахеометра относительно системы координат НЛС по каждой паре марок (t):
 (3)
(3)
После нахождения коэффициентов по имеющимся данным, они усредняются:
 (4)
(4)
Полученное в результате эксперимента значение масштаба равно 0,9997429, что позволяет говорить об очень низком влиянии этого параметра при дальнейших расчетах.
Другие рефераты на тему «Геология, гидрология и геодезия»:
Поиск рефератов
Последние рефераты раздела
- Анализ условий формирования и расчет основных статистических характеристик стока реки Кегеты
- Геодезический чертеж. Теодолит
- Геодезические методы анализа высотных и плановых деформаций инженерных сооружений
- Асбест
- Балтийско-Польский артезианский бассейн
- Безамбарное бурение
- Бурение нефтяных и газовых скважин