Энергетическая электроника
Асинхронные системы управления преобразователями применяют при существенных искажениях напряжения питающей сети, в частности при значительной несимметрии трехфазных напряжений по величине и фазе. Использование в таких условиях синхронной системы невозможно ввиду получающейся недопустимой асимметрии в углах α по каналам управления тиристорами. Наиболее распространены асинхронные СУ в преобр
азователях, потребляющих мощность, соизмеримую с мощностью питающей сети.
Синхронные системы импульсно-фазового управления
При синхронном способе импульсно-фазового управления отсчет угла подачи импульса управления производится от определенной фазы напряжения сети, питающей преобразователь:
![]() ,
,
где ![]() - угол подачи i-го импульса управления;
- угол подачи i-го импульса управления;
![]() - регулируемый угол задержки;
- регулируемый угол задержки;
![]() - угол начала отсчета угла задержки по отношению к напряжению сети.
- угол начала отсчета угла задержки по отношению к напряжению сети.
Синхронный способ управления в настоящее время является общепринятым и наиболее распространенным. Они могут быть одноканальные и многоканальные.
В синхронных системах управления момент получения управляющего импульса (т.е. угол управления α) отсчитывается от некоторой точки напряжения питающей сети (например, от момента его перехода через нуль). Такая синхронизация от напряжения питающей сети осуществляется посредством генератора опорного напряжения. Начало отсчета угла α либо совпадает с моментом синхронизации, либо сдвинуто относительно него на некоторый постоянный фазовый угол.
Горизонтальный метод управления
При горизонтальном методе управления формирование управляющего импульса осуществляется в момент перехода синусоидального напряжения через нуль, а изменение его фазы обеспечивается изменением фазы синусоидального напряжения, т.е. смещением его по горизонтали.
На рис.4.1, а приведена структурная схема одного канала одноканальной системы управления, использующей горизонтальный метод управления. Принцип работы схемы заключается в следующем. Генератор переменного напряжения ГПН вырабатывает синусоидальное напряжение, находящееся в определенном фазовом соотношении с анодным напряжением вентиля данного канала (рис.4.1, б). Обычно при m2³3 в качестве переменного напряжения берут напряжение соответствующей фазы сети (для трехфазной мостовой схемы сдвинутое на 90° относительно анодного напряжения вентиля). С выхода мостового фазовращательного устройства МФУ сдвинутое по фазе напряжение поступает на формирователь импульсов ФИ, где в момент перехода синусоиды через нуль формируется управляющий импульс, который затем усиливается усилителем мощности ВК. Угол сдвига фаз регулируется изменением напряжения управления Uу. ГПН и МФУ образуют фазосдвигающее устройство ФСУ.
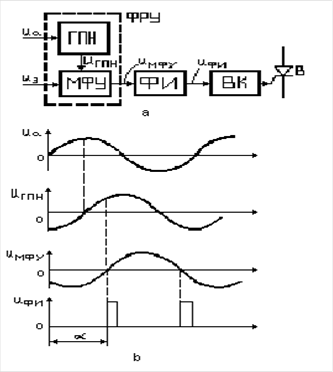
Рис.4.1
Структурная схема горизонтальной системы управления (а) и диаграмма, поясняющая ее работу (б).
Горизонтальный метод управления не нашел широкого распространения, так как фазовращатели чувствительны к изменению формы и частоты подаваемого напряжения, а применение в качестве регулируемого активного сопротивления транзисторов приводит к нарушению симметрии формируемых импульсов. Последний недостаток можно устранить, если применить общее регулируемое сопротивление (транзистор) для всех каналов.
Вертикальный метод управления
При вертикальном методе управления формирование управляющего импульса производится в результате сравнения на нелинейном элементе величин переменного, (синусоидального, пилообразного, треугольного) и постоянного напряжений. В момент, когда эти напряжения становятся равными и их разность изменяет знак, происходит формирование импульса. Фазу импульса можно регулировать за счет изменяя величину постоянного напряжения.
фазосдвигающее устройство при вертикальном методе управления состоит из генератора переменного напряжения и узла сравнения.
Схема работает следующим образом. Генератор переменного напряжения (ГПН) запускается при поступлении с синхронизатора (С) напряжения в момент появления на тиристорах прямого напряжения, т.е. в точках естественной коммутации. С выхода ГПН напряжение пилообразной формы поступает на устройство сравнения (УС), где сравнивается с напряжением управления uy. В момент сравнения пилообразного и управляющего напряжений устройство сравнения вырабатывает импульс, который через распределитель импульсов (РИ) поступает на формирователь импульсов ФИ1 или ФИ2 и дальше через выходные каскады (ВК1, ВК2) на тиристоры выпрямителя.
Одноканальная система управления может быть выполнена и для трехфазного выпрямителя. В одноканальных многофазных системах устройство сравнения, входящее в состав ФСУ, работает с частотой в m2 раз большей, чем в многоканальных системах, что требует в дальнейшем распределения импульсов управления по каналам. Генератор линейно-изменяющегося напряжения (ГЛИН) может быть выполнен или в одноканальном, или в многоканальном варианте. В рассматриваемой схеме, предназначенной для трехфазного мостового несимметричного выпрямителя, ГЛИН выполнен в одноканальном варианте. Схема работает следующим образом. ГЛИН запускается в моменты появления на тиристорах прямого напряжения, т.е. в точках естественной коммутации. Запуск ГЛИН обеспечивается синхронизатором (С). С выхода ГЛИН пилообразное напряжение подается на пороговое устройство (ПУ), которое срабатывает при достижении напряжения пилы значения Uп. Напряжение с выхода порогового устройства через дифференцирующую цепь (ДЦ) поступает на схемы совпадения (СС), куда также подается соответствующий импульс синхронизатора. При совпадении импульсов с выхода синхронизатора и дифференцирующей цепи выходной каскад ВК вырабатывает импульс управления, поступающий на отпирание тиристора соответствующей фазы (рис.5.1, б). Сдвиг импульса управления по фазе осуществляется путем изменения наклона пилообразного напряжения ГЛИН с помощью управляемого стабилизатора тока (УСТ). По такому же принципу может быть построена и схема управления для трехфазного мостового симметричного выпрямителя.
В связи с тем, что в системе управления, построенной по вертикальному методу, формирование импульса происходит в момент сравнения переменного и постоянного напряжений, всякое искажение формы кривой питающей сети (генератора переменного напряжения) будет приводить к ухудшению работы системы. Этот недостаток можно устранить, применяя в качестве переменного напряжение пилообразной или треугольной формы.
Системы управления, построенные по вертикальному методу, в настоящее время находят широкое распространение.
Таблица 1. Исходные данные для расчета выпрямителя. Задача №1
|
Показатели |
Варианты (последняя цифра номера зачетной книжки) | |||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 | |
|
|
460 |
115 |
60 |
230 |
80 |
48 |
230 |
460 |
115 |
60 |
|
|
200 |
100 |
300 |
100 |
200 |
160 |
300 |
100 |
200 |
200 |
|
|
380 |
220 |
220 |
380 |
380 |
220 |
380 |
380 |
220 |
230 |
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода