Достоверность передачи сообщений и надежность систем
Главной причиной искажения телемеханических сигналов являются внешние помехи: чем меньше их влияние на приемные устройства, тем выше достоверность передачи. Но поскольку разработчики систем телемеханики не могут влиять на уровень внешних помех, они повышают помехоустойчивость систем.
Если в канале связи кроме напряжения передатчика телемеханических сигналов существуют какие-либо другие напр
яжения, то все они в той или иной мере действуют на вход приемника и, следовательно, являются помехами. Реакция приемника на сигнал с помехами зависит от характера их взаимодействия. Различают два вида такого взаимодействия:
амплитуды сигнала S(t) и помех ![]() (t) складываются, т. е. x(t) = = S(t) +
(t) складываются, т. е. x(t) = = S(t) + ![]() (t). В этом случае помехи являются аддитивными;
(t). В этом случае помехи являются аддитивными;
результирующая амплитуда равна произведению амплитуд сигнала и помехи, т.е. x(t) = S(t) ![]() (t) . Помехи являются мультипликативными. Они могут вызываться изменениями коэффициентов усиления и параметров канала связи.
(t) . Помехи являются мультипликативными. Они могут вызываться изменениями коэффициентов усиления и параметров канала связи.
Для систем телемеханики характерными являются аддитивные помехи, которые по характеру действия во времени на вход приемника принято разделять на импульсные и флуктуационные.
Если переходные процессы в приемнике от импульса помехи успевают закончиться до поступления следующего импульса помех, считается, что на входе приемника действуют импульсные помехи (рис.2, а). Если на входе приемника непрерывно действует напряжение помех со случайной амплитудой, помехи называют флуктуационными или гладкими (рис.2, б). Характерной особенностью гладких помех является отсутствие амплитуды, более чем в 3 раза превышающей среднюю.
Фильтрацией сигнала на входе приемника, т.е. изменением полосы пропускания, можно импульсные помехи линии связи превратить во флуктуационные, так как время установления переходных процессов обратно пропорционально полосе пропускания.
Аддитивные помехи в канале могут быть внутренними или внешними. Внутренние помехи являются принципиально неустранимыми, так как представляют собой шум, возникающий из-за разных физических явлений (тепловой, гальванический эффекты и т.п.) в электрических цепях канала.
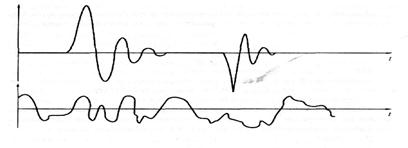
Рис.2. Импульсные и флуктуационные помехи
Обычно уровень шумов намного ниже возможных уровней телемеханических сигналов и не оказывает заметного влияния на работу систем. Внешние аддитивные помехи возникают в результате коммутационных процессов в электрических цепях, имеющих электромагнитную связь с каналом передачи сигналов, а также от грозовых разрядов в атмосфере.
Для аналитического описания аддитивных помех широко используется теория стационарных случайных процессов, т.е. функций, вероятностные характеристики которых не зависят от времени. Флуктуационная помеха на входе приемника представляет собой непрерывный случайный сигнал U(t). Для оценки мгновенных значений помехи из интегральной характеристики распределения плотности вероятности (рис.3) определяется вероятность появления того или иного напряжения, т.е. плотность вероятности того, что мгновенное значение нап-ряжения флуктуационной помехи Un лежит в пределах от U до U + ![]() U.
U.

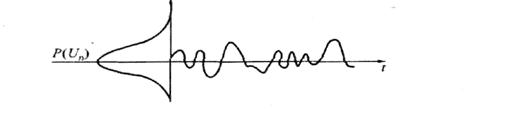
Рис.3 Распределение плотности вероятности помех
Плотность вероятности напряжения флуктуационных помех подчиняется закону нормального распределения (распределения Гаусса)
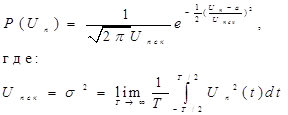
— среднее квадратичное значение переменной составляющей напряжения на интервале Т; а — среднее значение (постоянная составляющая) случайного напряжения (обычно для флуктуационных помех а = 0).
Для описания импульсных помех, действующих в канале связи систем телемеханики, также используются вероятностные характеристики, но их получение связано с большими трудностями. Это объясняется необходимостью иметь распределения импульсных помех по амплитуде, длительности, времени и т.п. Поэтому помехоустойчивость систем телемеханики чаще всего определяют относительно флуктуационных помех.
Помехоустойчивость приемников элементарных сигналов при флуктуационных помехах. Помехи, действующие на передаваемые телемеханические сигналы, могут привести к неправильному определению приемником значения напряжения на входе, т.е. вместо сигнала логической 1 приемник зарегистрирует сигнал логического 0 (Р]0 — ошибка перехода 1 ![]() 0) или наоборот (Р01 — ошибкаперехода 0
0) или наоборот (Р01 — ошибкаперехода 0 ![]() 1).
1).
Каждый приемник обладает определенной устойчивостью к искажениям импульсов на входе и фиксирует признаки правильно с некоторой вероятностью Р =1 - Рош=1 – (P![]() + P
+ P![]() ) Указанные вероятности характеризуют помехоустойчивость приемника, т.е. способность противостоять искажающим влияниям помех.
) Указанные вероятности характеризуют помехоустойчивость приемника, т.е. способность противостоять искажающим влияниям помех.
Для определения помехоустойчивости реальных приемников используется теория потенциальной помехоустойчивости, предложенная впервые В.А. Котельниковым. Математический аппарат этой теории ориентирован на определение предельной (потенциальной) помехоустойчивости приемников при действии флуктуационных помех.
Обычно помехоустойчивость реальных приемников ниже потенциальной, но расчеты позволяют правильно выбрать методы передачи, структуру сигналов и устройств.
Идеальный приемник, реализующий потенциальную помехоустойчивость сигналов, искаженных флуктуационными помехами, должен иметь образцы исходных сигналов для сравнения с ними сигнала, поступившего на вход. Полученный сигнал отождествляется с тем образцовым сигналом, с которым имеет минимальное различие.
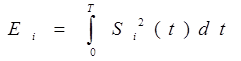
Обычно сравнивают энергию сигналов, которая для сигнала S(t) выражается так:
Если рассматриваются два сигнала ![]() и
и ![]() , то их взаимодействие может характеризоваться следующими функциями:
, то их взаимодействие может характеризоваться следующими функциями:
взаимной энергией

энергией разности между сигналами

коэффициентом взаимной корреляции
![]()
Если сигналы ![]() и
и ![]() ортогональны (
ортогональны (![]() =0), то
=0), то
Другие рефераты на тему «Транспорт»:
- Международные перевозки грузов
- Особенности ремонта топливной системы автомобиля КамАЗ
- Исследования возможностей диагностирования автомобиля
- Управление транспортом в экономически развитых странах мира
- Организация технического обслуживания и текущего ремонта с планировочным решением участка по диагностике и ремонту ходовой части легковых автомобилей
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск