Устройство башенных кранов
В верхней части башни находится оголовок, который жестко соединен с башней или связан с нею с помощью опорно-поворотного устройства. На противовесной консоли, расположенной со стороны, противоположной стреле, размещены противовесы, а также грузовая, стреловая и тележечная лебедки. На башенных кранах с поворотной башней вместо противовесной консоли устанавливают более простые по конструкции расп
орки, предназначенные для отвода от башни ветвей стреловых канатов. На распорках крепят только блоки стрелового расчалю и грузового каната. Железобетонные блоки балласта и блоки противовеса нужны для повышения устойчивости крана как в рабочем, так и в нерабочем состоянии. В кранах с неповоротной башней противовес располагают на конце противовесной консоли, а в кранах с поворотной башней — на поворотной платформе.
Механизм передвижения
Механизмы передвижения различных кранов существенно отличаются друг от друга; их компоновка во многом зависит от типа и характера ходового оборудования. Ходовое оборудование бывает автомобильное, пневмоколесное, гусеничное, шагающее и рельсовое. Передвижные башенные краны выпускаются на рельсовом и автомобильном ходу. Приставные краны не имеют механизма передвижения. Башенный кран на автомобильном ходу (например, АБКС-5) во время работы вывешивается на опорах и передвигаться не может.
Как правило, башенные краны опираются на рельс четырьмя, восемью, двенадцатью, а тяжелые – 32 колесами. При наличии восьми или большего числа колес их объединяют в ходовые балансирные (рычажные) тележки. Это делают для того, чтобы равномерно распределить нагрузку от крана на все колеса.
При жестком креплении ходовых колес (рис.2 а) за счет допустимых продольных и поперечных уклонов путей и неодинаковой жесткости основания кранового пути и самих рельсов может произойти перегрузка отдельных колес. При объединении колес в балансирные тележки (рис.2 б,в) нагрузка воспринимается всеми колесами. Для равномерного распределения этой нагрузки соотношение плеч рычагов-балансиров выбирают: для двухколесной тележки 1:2, для трехколесной 1:3 и т.п
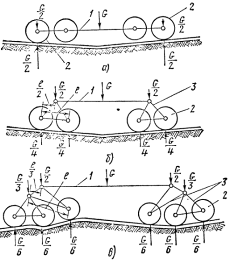
Рис.2 Схемы ходовой части рельсовых кранов.
а – жесткое крепление; б – балансирное крепление при двухколесных
тележках; в – то же, при трехколесных тележках;
1 – ходовая рама; 2 – ходовые колеса; 3 – балансиры.
G – нагрузка от массы крана на ходовую часть; l – расстояние между осями колес.
Расположение приводных (ведущих) ходовых колес и тележек бывает двустороннее – на разных рельсах и одностороннее – на одном рельсе. При расположении ведущих колес на разных рельсах кран движется более ровно, без перекосов. Однако при движении по путям с закруглением ходовые колеса, движущиеся по внутреннему рельсу, пробуксовывают и изнашиваются, поэтому чаще устраивают привод на колеса, расположенные на одном рельсе (односторонний).
При установке крана с односторонним приводом на пути, где есть участок с закруглением, ведущие колеса или тележки располагают на внешнем, относительно центра закругления, рельсе. Это позволяет снизить скорость и мощность механизма передвижения при проходе по кривым, повысить плавность движения крана и уменьшить износ реборд.
Кран, имеющий четыре ходовых колеса, приводится обычно от одного механизма передвижения с приводом на два колеса. При большем количестве колес, когда они объединены в тележки, каждая ведущая тележка имеет самостоятельный привод. В этом случае кран комплектуется обычно двумя ведущими и двумя ведомыми тележками.
Механизм передвижения кранов типа БКСМ и кранов-погрузчиков КП-8 выполнен в виде двух ведомых (без привода) и двух ведущих (приводных) ходовых тележек (рис.3 а,б).
Электродвигатель 1 передает крутящий момент через муфту на ведущий вал двухступенчатого цилиндрического зубчатого редуктора 3. На выходном валу редуктора сидит шестерня 4, находящаяся в зацеплении с зубчатым венцом 9 одного из ходовых колес 5. Вращение на венец второго ходового колеса передается через промежуточную шестерню 8. Все передачи выполнены на подшипниках качения, что снижает износ передач, упрощает эксплуатацию и уменьшает потери на трение.
На торцах рамы тележки размещены рельсовые откидные захваты 11, служащие как противоугонное устройство при действии ветровых нагрузок на кран в нерабочем состоянии. Они представляют собой пару губок, свободно висящих на поперечной горизонтальной оси. При перерывах в работе губки опускают вниз (как показано на рис.3) и с помощью рукояти и стяжного винта притягиваются друг к дугу. При этом нижние концы губок, имеющие пазы, прочно обжимают головку рельса, препятствуя угону крана ветром. Для работы крана губки разводятся в стороны и переводят в верхнее положение, опирая их винт на выемки в щеках торца тележки.
На одной из тележек крана закреплен конечный выключатель 10 ограничителя передвижения. При наезде на путевую линейку рычаг выключателя поворачивается и размыкает цепь питания привода тележки.
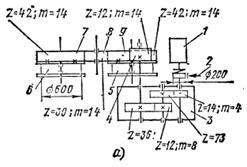
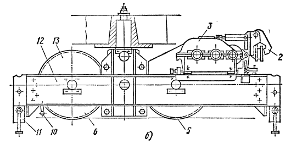
Рис. 3 Ведущая ходовая тележка кранов типа БКСМ и крана-погрузчика КП-8
а – кинематическая схема; б – общий вид
1 – электродвигатель; 2 – тормоз; 3 – редуктор; 4 – ведущая шестерня открытой передачи; 5,6 – колеса; 7,9 – зубчатые венцы колес; 8 – промежуточная (паразитная) шестерня; 10 – рычаг конечного выключателя; 11 – рельсовый откидной захват; 12 – рама; 13 – кожух колеса.
Механизм передвижения кранов серии КБ. Унифицированные механизмы передвижения бывают двух типов: тип I – для кранов, не имеющих ходовых тележек, с креплением механизма непосредственно на металлоконструкциях ходовой рамы и тип II – в виде отдельных ходовых тележек. В обоих случаях крепление механизма передвижения выполняется самоустанавливающимся по трехопорной схеме (рис.4 а,б). Двумя опорами 1 и 2 являются подшипники, поддерживающие выходной вал редуктора. Один подшипник зафиксирован в осевом направлении. Третьей опорой 3 служит лапа электродвигателя 4 или проушина 7. Эта опора обеспечивает восприятие крутящего момента и удерживает механизм от проворачивания вокруг выходного вала 6 редуктора 5.
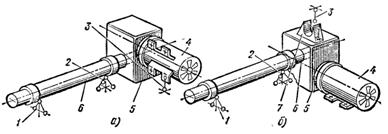
Рис. 4 Схема трехопорного крепления механизма передвижения
а – агрегата МТРГУ; б – агрегата ТКЧг
1,2,3 – опоры; 4 – электродвигатель; 5 – редуктор; 6 – вал выходной (промежуточный) тележки; 7 – проушина.
На ходовые тележки кранов серии КБ установлены глобоидные редукторы, смонтированные в единый блок: мотор – тормоз – редуктор (МТРГУ-120). С 1974 г. эти модернизированные агрегаты имели марку ТКЧг-125, и с 1979г. – ПК-5.
На рис.5 а изображена кинематическая схема механизма передвижения, применяемого для кранов серии КБ с грузовым моментом до 200 т∙м (КБ-60, КБ-100, КБ-160.2,
КБ-401А, КБ-405). Приводной агрегат, состоящий из электродвигателя 4, редуктора 2 и тормоза 11, расположен сбоку от рамы тележки. Электродвигатель имеет фланцевое исполнение и соединен с корпусом редуктора через промежуточную деталь – фонарь 5, также имеющий фланец. На валу электродвигателя посажена цилиндрическая шестерня 3 с косым зубом, находящаяся в зацеплении с шестерней быстроходного (глобоидного) вала редуктора. Подбирая соотношение зубьев этой пары шестерен можно изменить общее передаточное отношение всего агрегата. На другом конце быстроходного вала редуктора закреплен тормозной шкив 1, совмещенный с маховиком. Маховик предназначен для повышения плавности пуска и остановки механизма. Шкив охватывают колодки тормоза 11, закрепленного на кронштейне, привернутом к нижним лапам редуктора.