Анализ системы автоматического регулирования разрежения в топке
Содержание
Введение
1. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы, принцип автоматического управления и вид схемы
2. Составление структурной схемы
3. Определение закона регулирования системы
4. Определение передаточных функций системы по управляющему воздействиям и для ошибок по этим воздействиям
5. Анализ у
стойчивости системы. Определение устойчивости запасов
5.1 Анализ устойчивости по критерию Гурвица
5.2 Анализ устойчивости по критерию Найквиста
5.3 Определение запасов устойчивости
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
8. Оценка качества управления по переходным функциям
8.1 Отклонения регулируемой величины от своего установившегося значения характеризуется следующими величинами, показаниями
8.2 Быстродействие системы оценивается временем регулирования
8.3 Колебательность переходного процесса
9. Общие вопросы по работе
Литература
Введение
Цель работы: закрепление базовых знаний по курсу "Основы автоматики" на примере проведения анализа системы автоматического регулирования разрежения в топке.
Задание:
Дать краткую характеристику объекта управления, описать устройство и работу системы, составить её функциональную схему. Сделать вывод о принципе автоматического управления, и виде системы.
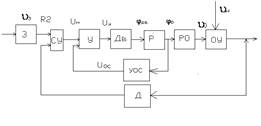
Составить структурную схему системы.
Определить закон регулирования системы.
Определить пересадочные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запасы устойчивости.
Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой зависимости.
Провести совместный анализ изменения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
Оценить качество управления по переходным функциям.
Сделать общие выводы по работе.
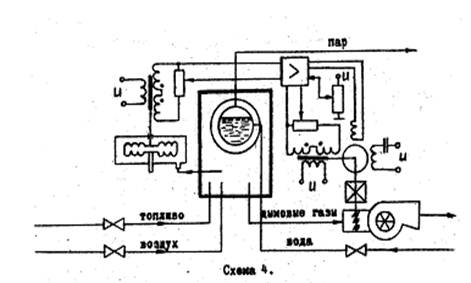
Таблица 1 - исходные данные.
|
Вар. |
Сх. |
К1 |
К2 |
Т1, с |
кд |
Тд, с |
ку |
кдв |
кр |
кв |
кп |
Тдв, с |
|
28 |
4 |
2 |
0,4 |
3 |
0,1 |
0,3 |
60 |
0,08 |
0,1 |
20 |
0,2 |
0,5 |
1. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы, принцип автоматического управления и вид схемы
Объектом управления является котёл. Регулируемой величиной разрежения воздуха внутри топки. Целью управления является поддержание нормального топочного режима на постоянном заданном уровне с помощью поворотных заслонок, что позволяет регулировать разрежение за счёт производительности дымососа. Основное возмущающее воздействие - применение расхода воздуха в топке.
Датчиком разрежения является дифтягометр, соединённый с верхней частью топки. Устройство сравнения выполнено на дифференциальном усилителе. Задатчик - потенциометр - формирует сигнализацию.
Управляющим воздействием на ОУ является производительность. Основное возмущающее воздействие изменения давления воздуха в топке Рт от расчётного. Дополнительным возмущающим воздействием может быть изменение потенциометра. Устройство сравнения выполнено на дифференциальном усилителе. ДУ выполняет функции сравнения, вычитание выходных сигналов (Uоз - Uос - Uз ) и усиление их разности. На вход усилителя поступает напряжение Uз и образный сигнал дифтягометра Uд, и сигнал с дифференциального устройства. Uос входной сигнал для электродвигателя - напряжение Uу, а входной сигнал - угол поворота вала электродвигателя φдв. Входной сигнал для редуктора φдв, выходной сигнал φр - поворота заслонки.
Устройство местной обряжной связи (УОС) выполнен в виде дифференциального преобразователя, выполнен в виде автотрансформатора, угол поворота вала двигателя φдв преобразуется в напряжение Uос, подвижный контакт жёстко связан с валом редуктора.
Регулирующий орган - заслонки, входной сигнал - это угол поворота вала редуктора φр.
Система работает: в установившемся режиме при равенстве разряжения в топке Рт заданному разрежению, сигнал на датчик не подается. При изменении разряжения, например при отсутствии большого количества воздуха в топку, датчик срабатывает, шток датчика связан с сердечником автотрансформатора, сердечник перемещается и изменяется напряжение датчика. Напряжение Uд являющееся сигналом возникшей ошибки системы, усиливается ДУ, и подаётся на обмотку возбуждения электродвигателя. Двигатель через редуктор открывает или закрывает заслонки дымососа, тем самым изменяется отток дымовых газов. Если разрежение выше заданного, то заслонка приоткрывается, а если ниже то закрывается. Одновременно вал электродвигателя изменяет положение сердечника, вследствие чего выходное напряжение Uос автотрансформатора подаётся на ДУ, где вычитается из напряжения Uд датчика. Усилитель усиливает разность напряжений Uд и Uос, за счёт местной отработанной связи обеспечивает пропорциональную зависимость между напряжением Uд и углом поворота вала электродвигателя φдв. Поэтому изменение угла поворота заслонки в дымососе пропорционально величине отклонения разряжения. В результате разрежение в топке возвращается к заданному режиму.
При непрерывном изменении разрежения процесс регулирования идет непрерывно. Если разрежения устанавливается, то через некоторое время система придет в новое установившееся положение.
В системе реализован принцип управления по отклонению.
Система является стабилизирующей.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды