Анализ динамического поведения механической системы
Рассматриваемая нами механическая система является неизменяемой, т.е. тела, входящие в систему, недеформируемые и скорости их точек относительно друг друга равны нулю. Поэтому сумма мощностей всех внутренних сил будет равняться нулю:
(1.12) ![]() = 0;
= 0;
Будут равняться нулю и мощности следующих внешних сил, приложенных в точках, ск
орости которых равны нулю:
![]()
Сумма мощностей остальных внешних сил:
(1.13) ![]()
С учетом кинематических соотношений (1.7) сумму мощностей внешних сил определим:
(1.14) ![]()
где ![]() приведенная сила.
приведенная сила.
Упругую силу считаем пропорциональной удлинению пружины, которое равно сумме статического ![]() и динамического
и динамического ![]() удлинений:
удлинений:
(1.15) ![]()
Сила вязкого сопротивления ![]() , тогда
, тогда
(1.16) ![]()
В состоянии покоя системы приведенная сила равна нулю. Полагая в (1.16) S=0, ![]() =0 и F(t)=0, получаем условие равновесия системы:
=0 и F(t)=0, получаем условие равновесия системы:
(1.17) ![]()
Отсюда статическое удлинение пружины равно:
(1.18) ![]()
Подставляя (1.18) в (1.16), получаем окончательное выражение для приведенной силы:
(1.19) ![]()
Подставив выражения для производной от кинетической энергии и сумму мощностей всех сил с учетом (1.19) в (1.1), получаем дифференциальное уравнение движения системы:
(1.20) ![]()
(1.21) ![]()
где k циклическая частота свободных колебаний;
![]()
n – показатель степени затухания колебаний;
1.2 Определение закона движения системы
Проинтегрируем дифференциальное уравнение (1.20). общее решение этого неоднородного уравнения складывается из общего решения однородного уравнения ![]() и частного решения неоднородного
и частного решения неоднородного ![]() :
:
S = ![]() +
+ ![]() ;
;
Однородное дифференциальное уравнение, соответствующее данному неоднородному, имеет вид: ![]()
Составим характеристическое уравнение и найдем его корни:
т.к. n < k => решение однородного уравнения имеет вид:
![]()
где ![]() частное решение дифференциального уравнения ищем в виде правой части:
частное решение дифференциального уравнения ищем в виде правой части: ![]()
![]() далее получаем:
далее получаем:
![]()
Сравнивая коэффициенты при соответствующих тригонометрических функциях справа и слева, получаем систему алгебраических уравнений для определения состояния А и В
Решая эту систему получаем следующие выражения:
 А = 0.04 м;
А = 0.04 м;
![]() В = - 0.008 м;
В = - 0.008 м;
Общее решение дифференциального уравнения:

Постоянные интегрирования ![]() определяем из начальных условий, при t = 0 имеем:
определяем из начальных условий, при t = 0 имеем:
Решая эту систему получаем:

![]()
![]()
![]()
1.3 Определение реакций внешних и внутренних связей
Для решения этой задачи расчленим механизм на отдельные части и изобразим расчетные схемы отдельно для каждого тела. Определение реакций связей проведем с помощью теоремы об изменении кинетического момента и теоремы об изменении количества движения.
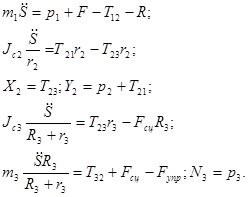
Тело №1: ![]()
![]()
Тело №2: 
Тело №3: 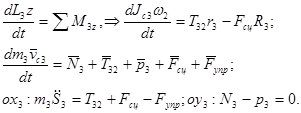
![]()
C учётом кинематических соотношений (1.7) полученную систему уравнений преобразуем к вид:
Решая эту систему, получаем выражение для определения реакций связей:
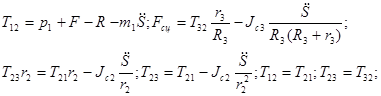
![]()
2. Построение алгоритма вычислений:
(2.1) Исходные данные:
![]()
(2.2) Вычисление констант:
![]()
![]()
![]()
![]()
(2.3) Задание начального времени: t=0;
(2.4) Вычисление значений функций в момент времени t=0;
![]()
![]()
(2.5) Вычисление реакций связей:
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода