Анализ и моделирование методов когерентной оптики в медицине и биологии
Выбор между объектом и его изображением для решения задачи распознавания не всегда легок. Объект или его изображение должны обладать определенными, хорошо известными свойствами, чтобы они могли быть введены в когерентную оптическую систему распознавания образов. Во-первых, объект или его изображение не должны рассеивать свет (это исключает множество объектов, в том числе и людей, для непосредст
венного использования). Во-вторых, объект или изображение должны быть доступны для оптической системы (это исключает объекты, находящиеся внутри других непрозрачных или диффузных объектов, а также объекты, которые не могут быть легко доставлены в лабораторию). В-третьих, свет должен хорошо отображать характеристики объекта, полезные для распознавания (для некоторых объектов наиболее полезные характеристики не совпадают с диапазоном длин волн когерентной оптики, поэтому в рентгеновском и акустическом диапазонах нужно использовать изображения, а не сами объекты). С другой стороны, непосредственное использование самих объектов иногда оказывается выгодным. Так, оно делает процедуру распознавания более быстрой (практически мгновенной). Кроме того, реальные объекты могут исследоваться одновременно или последовательно при использовании различных длин волн, состоянии поляризации света и т.д.
Выбор между единичным объектом (или изображением) или множеством объектов (или изображений) также труден и важен. Мы приведем некоторые преимущества каждого из них и поймем это после более общего обсуждения. Единичный объект или изображение имеют единственную ориентацию (три угловые степени свободы фиксированы для него). Таким образом, можно использовать много различных оптических фильтров, а также устройств вращения изображения, чтобы заставить один фильтр быть более или менее согласованным с ориентацией объекта.
Рассмотрим, например, объект в виде непрозрачного цилиндра. При рассматривании цилиндра с любого из двух направлений вдоль его оси он выглядит как круг. При рассматривании его с любого направления, перпендикулярного оси, он оказывается прямоугольником. И наконец, цилиндр принимает другие формы с иных направлений. Используя круглые прямоугольные маски, а также много других масок, мы можем быть достаточно уверенными, что сможем идентифицировать этот объект и определить его ориентацию. Полагая три угла и1, и2 и и3 , определяющих ориентацию, случайными независимыми переменными, мы можем написать функцию распределения Р(и1, и2 ,и3). К чтобы описать вероятность любой угловой ориентации. Пусть изображение, соответствующее углам и1, и2 ,и3, описывается функцией I(хч у, и1, и2 ,и3)- Используя одну маску, мы можем сделать одно — распознать усредненное или ожидаемое изображение
![]() .
.
Для многих объектов ![]() не имеет каких-либо характерных особенностей. Второй подход заключается в распознавании I (х, у, и1, и2 ,и3 ) в заданном диапазоне от и1 до и1 +Ди1 от и2 до и2+ +Ди2 и от и3 до и3 +Ди3, где Ди1, Ди2 и Ди3 — наибольшие величины, которые еще обеспечивают «хорошую» корреляцию с I(х, у, и1 +Ди1 , и2+Ди2 , и3 +Ди3,) Тогда, испытав много объектов, мы можем положить, что полное число типов масок, которое мы ищем, равно числу масок, хорошо коррелирующих с I(х, у, и1, и2 ,и3). деленному на величину Р(и1, и2 ,и3) Ди1, Ди2 ,Ди3- Мы можем теперь так выбрать набор и1, и2 ,и3. чтобы он обеспечил наиболее отличительные характеристики. Точность требует, чтобы мы принимали во внимание статистически значительное число хороших корреляций. Конечно, проверяя множество объектов параллельно (используя мощную и самую замечательную способность оптической обработки), мы можем осуществить статистическое усреднение одновременно. В настоящее время используются как последовательные, так и параллельные системы распознавания.
не имеет каких-либо характерных особенностей. Второй подход заключается в распознавании I (х, у, и1, и2 ,и3 ) в заданном диапазоне от и1 до и1 +Ди1 от и2 до и2+ +Ди2 и от и3 до и3 +Ди3, где Ди1, Ди2 и Ди3 — наибольшие величины, которые еще обеспечивают «хорошую» корреляцию с I(х, у, и1 +Ди1 , и2+Ди2 , и3 +Ди3,) Тогда, испытав много объектов, мы можем положить, что полное число типов масок, которое мы ищем, равно числу масок, хорошо коррелирующих с I(х, у, и1, и2 ,и3). деленному на величину Р(и1, и2 ,и3) Ди1, Ди2 ,Ди3- Мы можем теперь так выбрать набор и1, и2 ,и3. чтобы он обеспечил наиболее отличительные характеристики. Точность требует, чтобы мы принимали во внимание статистически значительное число хороших корреляций. Конечно, проверяя множество объектов параллельно (используя мощную и самую замечательную способность оптической обработки), мы можем осуществить статистическое усреднение одновременно. В настоящее время используются как последовательные, так и параллельные системы распознавания.
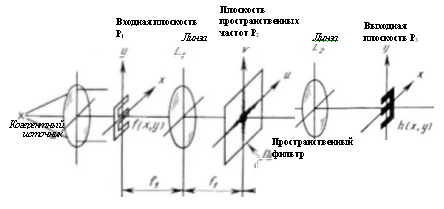
Рис. 6.1. Оптическое преобразование Фурье и обработка изображений
Как тогда происходит распознавание образов с помощью когерентной оптики? Ответ, хорошо аргументированный в других работах [1.71], состоит в использовании оптического фурье-преобразования над входным распределением (формируемого в плоскости Р2 в результате прохождения когерентного света через линзу L1 как показано на рис. 6.1). Таким образом, сформированная картина преобразования Фурье имеет ряд специфических свойств, а именно:
1) амплитудные характеристики Фурье-образа не зависят от поперечных размеров объекта или положения маски;
2) амплитудные характеристики Фурье-образа не изменяются при преобразовании координат вида (х, у)—>-( —х, —у). Таким образом, например, цифры 6 и 9 имеют преобразования Фурье с идентичным распределением амплитуд;
3) при когерентной записи (т. е. при использовании интерференции с опорным пучком) фазовая информация сохраняется, и цифры 6 и 9 могут быть отличены друг от друга. Такой комплексный фильтр обычно называют согласованным пространственным фильтром;
4) фурьс-образ поворачивается в пространстве при повороте объекта;
5)размеры Фурье-образа увеличиваются пропорционально уменьшению размеров объекта или изображения и наоборот;
6)самая яркая часть Фурье-образа находится в его центре;
7)комплексная амплитуда Фурье-образа представляет собой когерентную сумму индивидуальных комплексных амплитуд от дельных составных частей объекта или изображения.
Из свойств 1 и 7 мы видим, что поле, состоящее из многих объектов, может быть обработано параллельно. При этом все объекты вносят самостоятельные и совершенно одинаковые преобразования Фурье, не зависящие от их поперечного положения во входной плоскости.
6.1 Операционные методы
Имеются два отдельных способа использования преобразования Фурье для решения задачи распознавания образов. При первом способе (предназначенном для случаев последовательной обработки, а также для некоторых случаев параллельной обработки) мы можем измерить амплитудную (а иногда и фазовую) информацию, содержащуюся в Фурье-преобразовании и сравнить ее оптическими или электронными методами с аналогичными картинами для различных, ранее встречавшихся объектов. Оптически эта операция осуществляется помещением маски (позитивной или комплексной) в плоскость Фурье-преобразования и измерением прошедшего света. При использовании электронных методов сравнения в частотную плоскость помещают специальные фотодетекторы в виде секторов и колец [1.72]. При втором способе (он соответствует некоторым случаям параллельной обработки) мы можем использовать свет, прошедший через фильтр, для формирования изображения входной сцены. Изображение оказывается самым ярким для тех частей входной сцены, для которых через маску прошло больше всего света. Для равномерно освещенной сцены это означает, что объекты, наиболее близко соответствующие тест-объекту, использованному для изготовления маски, проявляют себя в виде ярких пятен. Ограничив этот отклик, мы можем определить местоположение и сосчитать объекты предварительно выбранной формы.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода