Навигационные особенности плавания в штормовых условиях
Направление бега волны является исходным для графического решения задач с помощью диаграммы. Горизонтальная ось — это проекция скорости хода судна на направлении бега волны.
Верхняя часть диаграммы представляет собой семейство кривых, где каждая кривая соответствует определенному значению видимого периода волн т. В левой части нижней половины диаграммы, расположенной левее пунктирной к
ривой, = оо соответствует случаям, когда скорость бега волны больше скорости судна, а верхняя половина диаграммы соответствует случаям, когда скорость бега волны меньше скорости судна.
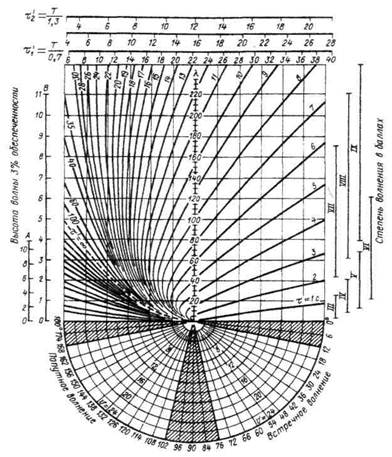
Рис. 1. Универсальная штормовая диаграмма
Пассивная штормовая стабилизация корабля достигается за счет заострения ватерлинии в оконечностях корпуса и скругления формы шпангоутов в его средней части. При этом главной архитектурной особенностью такой стабилизации всегда является исключение чрезмерных объемов в надводной части герметичного корпуса, а также всяческое снижение высоты и площади парусности палубных надстроек и мачт. Последнее ограничение неприемлемо для большого класса малых плавсредств и крупных судов, таких как:
· спасательные шлюпки, имеющие относительно малую собственную массу и большой внутренний объем для размещения пассажиров;
· паромы, размещающие в своем корпусе колесную технику;
· авианесущие корабли, нуждающиеся в просторных ангарах и высоких полетных палубах;
· все классы скоростных глиссирующих судов и гидросамолетов.
Большой запас плавучести, по какой бы причине он ни придавался морскому судну, всегда крайне отрицательно влияет на безопасность штормового плавания, так как он всегда приводит к резкой качке, слемингу, зарываемости под гребнями крутых волн и, как следствие, к неизбежной опасности захвата и опрокидывания корабля под ударами шторма в случае выхода из строя его двигателей или движителей. Тем не менее, исторический опыт кораблестроения уверенно демонстрирует эффективность методов активного штормового плавания легконагруженных судов. Все эти методы ориентированы на активное штормовое маневрирование корабля, способного противопоставить штормовой стихии энергию своих двигателей или парусного вооружения, находящихся под непрерывным контролем ходовой вахты и активным управлением.
С каждой из штормовых волн судно с большой парусностью и высоким надводным бортом неизбежно вступает в активное динамическое взаимодействие, интенсивность которого приводит к огромным нагрузкам на корпус, нарушающим его прочность, и к интенсивной качке, делающей условия обитания на борту такого судна невыносимыми. В реальной морской практике ходовая вахта старается выбрать такой курс и такую скорость хода судна, при которых воздействия шторма менее всего угрожают безопасности плавания. В зависимости от архитектуры судна, таким оптимальным режимом штормового плавания будет либо ход по ветру, либо лагом к волне, либо курсом носом на волну. Во всех этих режимах требуется повышенная надежность движителей и рулевых устройств, а также достаточно высокий опыт управления судном у капитана, его вахтенного помощника и рулевого, так как любая малейшая ошибка в штормовом маневрировании, совершенная на ходовом мостике, может привести к катастрофе.
Для надежного определения места с помощью РЛС необходимо быть уверенным в правильном опознании объектов, наблюдаемых на экране индикатора. Наиболее точно могут быть опознаны объекты, называемые точечными ориентирами. К ним относятся обозначенные на карте небольшие островки, отдельно лежащие камни, скалы, плавучие знаки навигационного ограждения, оконечности молов и причалов, а также радиолокационные маяки-ответчики.
Хорошее изображение, отвечающее по форме очертаниям берега на карте, дают высокие обрывистые берега. Такой берег может быть опознан достаточно уверенно. Низменные песчаные мысы, плоское побережье, покрытые снегом пологие берега, плавучий лед рассеивают энергию и могут не давать эхо-сигналов. В результате этого возвышенные полуострова, соединяющиеся с основным берегом низкими перешейками, могут изображаться на экране РЛС как острова. Если мыс имеет пляж, за которым лежит обрывистый склон, то при пеленговании или измерении расстояния до такого мыса легко ошибиться, так как урез воды на определенных расстояниях радиолокатор не обнаружит. Ошибки при измерении расстояний до берега особенно вероятны в морях, имеющих низкие берега и значительные колебания уровня воды.
Обычно уже на расстоянии от 15 до 8 миль изображение на экране индикатора достаточно верно передает очертания береговой черты, что позволяет сопоставлять его с картой.
Для определения места могут быть использованы радиолокационные расстояния до опознанных на экране РЛС объектов или пеленги этих объектов.
Радиолокационное измерение расстояний в большинстве случаев производится с помощью подвижного круга дальности (ПКД). Расстояние до объекта можно определить также на глаз по неподвижным кругам дальности (НКД). При этом способе ошибка расстояния составляет в среднем 0,1 интервала между соседними кругами. Для повышения точности наблюдений расстояния следует измерять до выдающихся частей берега, направленных к судну.
Радиолокационные пеленги измеряют при помощи механического или электронного визира, устанавливаемого над серединой эхо-сигнала. Истинный пеленг на объект находят затем путем исправления радиолокационного .пеленга поправкой гирокомпаса. Если РЛС не имеет ориентации по норду, то измеряют КУ эхо-сигнала, который переводят в ИП.
Пеленги следует брать на обрывистые оконечности, направленные перпендикулярно к визирной плоскости. Ошибка в пеленге будет тем меньше, чем дальше располагается эхо-сигнал от центра экрана, поэтому при взятии пеленгов следует использовать шкалу наиболее крупного масштаба.
В большинстве случаев точность радиолокационного измерения расстояний значительно выше точности радиолокационного пеленгования, что необходимо иметь в виду при определении места судна. Только на малых расстояниях, не превышающих 0,5 мили, линия пеленга не уступает по точности измеренному расстоянию.
Определение места судна по радиолокационным расстояниям. Если на экране РЛС можно выбрать два или три удачно расположенных точечных или характерных ориентира, то место судна может быть получено по измеренным до этих ориентиров радиолокационным расстояниям. Проведя радиолокационные наблюдения, находят на карте ориентиры, соответствующие эхо-сигналам, от которых наносят вблизи счислимого места судна засечки радиусами, равными измеренным расстояниям в масштабе карты. Место судна получают в пересечении засечек (рис. 1, а).
Если на экране индикатора имеется изображение ровной береговой черты, не имеющей характерных выступающих мысов, и одного точечного ориентира, то место судна получают следующим приемом (рис. 1, б). Измерив расстояние D1 до точечного объекта, подводят подвижной круг дальности касательно к кромке берега, т. е. измеряют кратчайшее расстояние D2 до береговой черты. От точечного ориентира радиусом D1 проводят на карте дугу аа''. Взяв циркулем расстояние D2, находят на дуге аа' такое положение острия циркуля, при котором карандаш опишет окружность bb', касательную к береговой черте. Место накола острия циркуля будет соответствовать положению судна. Полученную с помощью РЛС обсервованную точку обозначают кружком с полукругом над ним.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск