Проектирование рабочего оборудования одноковшового экскаватора

Условие Мсв ≤ [М] выполняется.
Схема привязки стрелового гидроцилиндра представлена на рис.10, где через а = ОсА обозначено расстояние от оси пяты стрелы до оси шарнира, соединяющего гидроцилиндр со стрелой, а через b = ОсОпц - расстояние между осями пят стрелы и гидроцилиндра. Найдем сначала показанные на рис. 10 у
глы ![]() и
и ![]() . Потребуем, чтобы сопротивления подъему рабочего оборудования в его крайних положениях преодолевались равными усилиями на штоке гидроцилиндра, для чего необходимо, чтобы было выполнено условие:
. Потребуем, чтобы сопротивления подъему рабочего оборудования в его крайних положениях преодолевались равными усилиями на штоке гидроцилиндра, для чего необходимо, чтобы было выполнено условие:
![]()
Приближенно, учитывая малость углов ![]() и
и ![]() , можно принять
, можно принять ![]() ;
; ![]() ;
; ![]() , после чего:
, после чего:
![]() ;
; ![]() .
.
где
Тогда

![]()
После отыскания углов ![]() и
и ![]() расстояния а и b определятся как
расстояния а и b определятся как
![]() , м;
, м;
![]() , м
, м
![]()
![]()
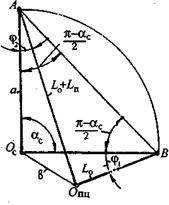
Рис. 10. Привязка стрелоподъемного гидроцилиндра.
2.4.4 Привязка гидроцилиндра привода рукояти
В качестве исходных данных для привязки гидроцилиндра привода рукояти используют размеры очертания удлиняющей части стрелы вместе с кинематической осью последней (по результатам построения конфигурации стрелы), положения кинематической оси рукояти, предельно отвернутой от стрелы 1 (рис. 11) и предельно подвернутой к ней 2 (из построений осевого профиля), размеры окончательно выбранного гидроцилиндра -ход поршня Lп и длина по концевым шарнирам с полностью втянутым штоком L0.
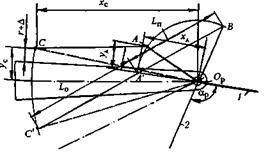
Рис. 11. Привязка гидроцилиндра привода рукояти.
Первоначально хвостовую часть рукояти (кривошип) можно ориентировать произвольно относительно ее кинематической оси, например, на продолжении последней: ОрА' при отвернутой от стрелы рукояти, ОрВ при подвернутой рукояти. Длину кривошипа ![]() назначают из условия, чтобы основание А'В треугольника А'ВОр в точности было равно размеру Lп, так что
назначают из условия, чтобы основание А'В треугольника А'ВОр в точности было равно размеру Lп, так что
![]() , м
, м
Все последующие действия аналогичны таковым для привязки ковшового гидроцилиндра: А'С' = L0 на продолжении отрезка А'В, поворот ной ОрА'С' в положение ОрАС (точка С на расстоянии ![]() от верхнего обреза балки стрелы). В результате привязки гидроцилиндра получено положение шарнира С относительно удлиняющей части стрелы и ориентация кривошипа ОрА относительно кинематической оси рукояти 1.
от верхнего обреза балки стрелы). В результате привязки гидроцилиндра получено положение шарнира С относительно удлиняющей части стрелы и ориентация кривошипа ОрА относительно кинематической оси рукояти 1.
2.5 Расчет рабочего оборудования
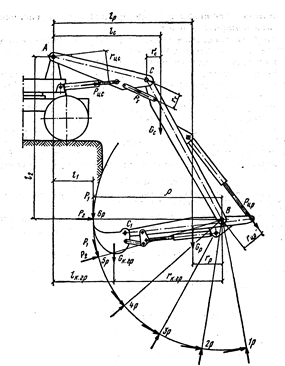
Рис. 12. Схема к определению усилий, действующих на рабочее оборудование одноковшового экскаватора.
Копание поворотом ковша. На рабочее оборудование действуют наибольшие нагрузки в период копания гидроцилиндром ковша на максимальной глубине. Если наибольшее усилие на режущей кромке ковша не может быть достигнуто из-за ограниченной устойчивости экскаватора или ограничения реактивного усилия в гидроцилиндре рукояти, то за расчетное принимают положение, при котором рукоять повернута на угол, допускающий развитие максимального усилия на режущей кромке ковша, что соответствует расчетному положению рукояти 3р (рис.12) и ковша Зк (рис.13).
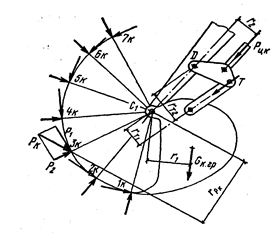
Рис. 13. Схема к определению усилий в тяге ковша.
Определим наибольшее реактивное усилие, которое возникает в цилиндре рукояти РЦР, кН:
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 6р:
ΣМВ = 0
- РЦР6 · (rЦР6) + GК.ГР · (rК.ГР6) + GР · (rР6) + РСР · (ρ) = 0
РЦР6 = 1 / rЦР6 · (GК.ГР · (rК.ГР6) + GР · (rР6) + РСР · (ρ)) =
= 1/0.39 · (11 · 2.97 + 7.65 · 0.83 + 39.5 · 3.7) = 473.8 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 5р:
ΣМВ = 0
- РЦР5 · (rЦР5) + GК.ГР · (rК.ГР5) + GР · (rР5) + РСР · (ρ) = 0
РЦР5 = 1 / rЦР5 · (GК.ГР · (rК.ГР5) + GР · (rР5) + РСР · (ρ)) =
= 1/0.502 · (11 · 2.81 + 7.65 · 0.78 + 39.5 · 3.7) =364.6 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 4р:
ΣМВ = 0
- РЦР4 · (rЦР4) + GК.ГР · (rК.ГР4) + GР · (rР4) + РСР · (ρ) = 0
РЦР4 = 1 / rЦР4 · (GК.ГР · (rК.ГР4) + GР · (rР4) + РСР · (ρ)) =
= 1/0.55 · (11 · 2.3 + 7.65 · 0.65 + 39.5 · 3.7) =320 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 3р:
ΣМВ = 0
- РЦР3 · (rЦР3) + GК.ГР · (rК.ГР3) + GР · (rР3) + РСР · (ρ) = 0
РЦР3 = 1 / rЦР3 · (GК.ГР · (rК.ГР3) + GР · (rР3) + РСР · (ρ)) =
= 1/0.54 · (11 · 1.62 + 7.65 · 0.45 + 39.5 · 3.7) =310 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 2р:
ΣМВ = 0
- РЦР2 · (rЦР2) + GК.ГР · (rК.ГР2) + GР · (rР2) + РСР · (ρ) = 0
РЦР2 = 1 / rЦР2 · (GК.ГР · (rК.ГР2) + GР · (rР2) + РСР · (ρ)) =
= 1/0.54 · (11 · 0.72 + 7.65 · 0.2 + 39.5 · 3.7) =324 кН
Определим реактивное усилие, которое возникает в цилиндре рукояти в положении 1р:
ΣМВ = 0
- РЦР1 · (rЦР1) - GК.ГР · (rК.ГР1) - GР · (rР1) + РСР · (ρ) = 0
РЦР1 = 1/ rЦР1 · (- GК.ГР · (rК.ГР1) - GР · (rР1) + РСР · (ρ)) =
= 1/0.36 · (-11 · 0.26 - 7.65 · 0.07 + 39.5 · 3.7) =396.5 кН
Мы определили, что наибольшее реактивное усилие в цилиндре рукояти будет возникать в положении 6р. Далее мы выбираем по стандартизированному ряду гидроцилиндр, определяя его диаметр и площадь поршневой полости. Из полученных расчетов выбираем гидроцилиндр с диаметром поршня d = 0.125 м. Максимальное давление в гидроцилиндре принимаем равным 32 МПа. Подробный расчет гидроцилиндра будет рассмотрен нами далее.
Другие рефераты на тему «Транспорт»:
- Обзор рынка морских контейнерных перевозок
- Система питания двигателя сжиженным газом. Карбюратор К-126 Г. Работа четырехтактного двигателя
- Использование эксплуатационных материалов и экономия топливно-энергетических ресурсов
- Конструкция и ремонт рессорного подвешивания
- Разработка международного маршрута перевозок груза
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск