Автоматическая система управления питания котельных агрегатов
 ,
,
где Р1(ti)-экспериментальное значение давления в момент времени ti, Р2(ti)-расчетное значение давления в момент времени ti, n – число расчетных точек.
|
теор |
экспер. | valign=bottom >
Ti |
|
80,00 |
80,20 |
125 |
|
81,00 |
80,90 |
185 |
|
81,62 |
81,00 |
225 |
|
82,47 |
82,00 |
285 |
|
82,98 |
82,15 |
325 |
|
83,58 |
82,40 |
375 |
|
84,80 |
84,00 |
500 |
|
88,11 |
88,00 |
1000 |
|
89,80 |
90,00 |
3000 |
 = 0,41
= 0,41
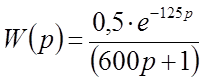
Исходя из этого, в дальнейших расчетах будем использовать эквивалентный объект, описываемый с точностью 41% дифференциальным уравнением 1-го порядка с самовыравниванием и запаздыванием со следующей передаточной функцией:
Найдем величину коэффициента усиления объекта:
 , Ко=0,5
, Ко=0,5
Передаточная функция объекта имеет вид:
4. Выбор типового регулятора АСР и определение параметров его настройки
В любой АСР управляющее воздействие на объект регулирования формируется автоматическим регулятором в соответствии с принятым алгоритмом регулирования и требуемым качествам АСР.
Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования.
Существует множество методик выбора регулятора. Воспользуемся методикой, основанной на анализе вида передаточной функции объекта регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций:
И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τо/То<0.1);
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τо/То<0.1;
ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τо/То<1;
ПИД – регуляторы при условии τо/То<1 и малой колебательности исходных процессов.
В нашем случае (АСР влажности) подходящим является ПИ-регулятор, т.к. по условиям задачи на объект действуют возмущения, вызывающие отклонения уровня, соответствующие 5 % при перестановке регулирующего органа и по виду переходного процесса и передаточной функции. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и следовательно, более дорогой) ПИД - регулятор, который имеет лучшие показатели регулирования.
5. Анализ динамических характеристик АСР с типовым регулятором
Принято для расчета переходных процессов АСР технологических объектов (химических, металлургических, а также предприятий стройиндустрии) применять метод расчета переходных процессов по возмущению со стороны регулирующего органа. Задание регулятору определяется как правило по показателям качества конечного продукта (или полупродукта), поэтому задание регулятора не меняют, а процесс регулируют посредством воздействия на регулирующий орган, через который, как правило, идут основные возмущения. Определяем переходный процесс АСР по возмущающему воздействию на регулирующий орган. В этом случае передаточная функция замкнутой системы определяется по формуле
Wз (p) = Wоб (p) / (1 + Wоб (p) * Wрег (p))
Регулирующий орган и объект регулирования представлены передаточной функцией (5.2).
Wоб (p) = Ко * е – τ*р / (То p + 1)
В программном продукте Simulink передаточная функция Wоб(р) представлена последовательно соединенными звеньями: апериодическим и звеном запаздывания (рис.6).

Рис. 6. Структура объекта регулирования в программном продукте Simulink.
ПИ-регулятор представлен двумя, суммирующимися в итоге, звеньями: пропорциональным Wп(р)=Kp и интегрирующим Wи = 1 / Ти * p . Передаточная функция регулятора, таким образом, определяется по формуле (5.3):
Wрег (p) = Wп + Wи = Кр + 1 / Ти * p
где Wп – усилитель
Wи – интегратор
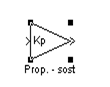

В программном продукте Simulink структура регулятора будет выглядеть следующим образом
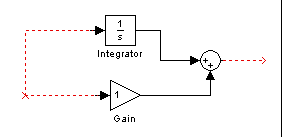
Рис.5. Структура ПИ-регулятора в программном продукте Simulink.
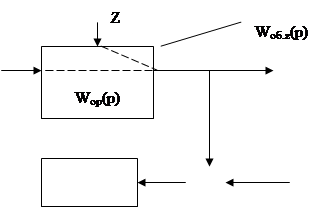
Структурная схема АСР, соответствующая ее функциональной схеме с обобщенным объектом регулирования и обозначенным регулятором представлена на рисунке 5
Рис. 6 Структурная схема АСР.
Данная схема детализируется для расчета замкнутой АСР и приводится к виду
 | |||||
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды