Автоматическая система управления процессом передвижения пассажирского лифта
Для реализации перечисленных функций применяем универсальный сервоконтроллер ELESY PCI-Servo 4 производства фирмы «ЭЛЕСИ» Россия.
Контроллер предназначен для измерения непрерывных сигналов, представленных напряжением постоянного тока и (или) постоянным током, сбора и обработки информации с первичных датчиков, формирования сигналов управления по заданным алгоритмам, приема и передачи информа
ции по последовательным каналам связи в системах измерения, контроля и управления объектами.
Основная область применения – системы управления перемещением технологического оборудования в соответствии с заданной программой движения.
Нижний уровень
Нижний уровень АСУ ТП состоит из преобразователя частоты ESD-TCL фирмы «ЭЛЕСИ», который является специальной разработкой для управления безредукторным асинхронным приводом лифтовой лебёдки; источник питания Siemens LOGO для подачи напряжения питания 24В;
датчик положения, определяющий точное местонахождение кабины в шахте; два механических нормально замкнутых тормоза; посты вызовов и приказов; конечные выключатели «верхний этаж» и «нижний этаж».
На дискретные входы сервоконтроллера подаются команды с постов вызовов и приказов, сигналы о нахождении лифта в верхнем и нижнем положении в шахте, сигналы открывания закрывания дверей кабины лифта, сигналы аварий.
2.4 Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы
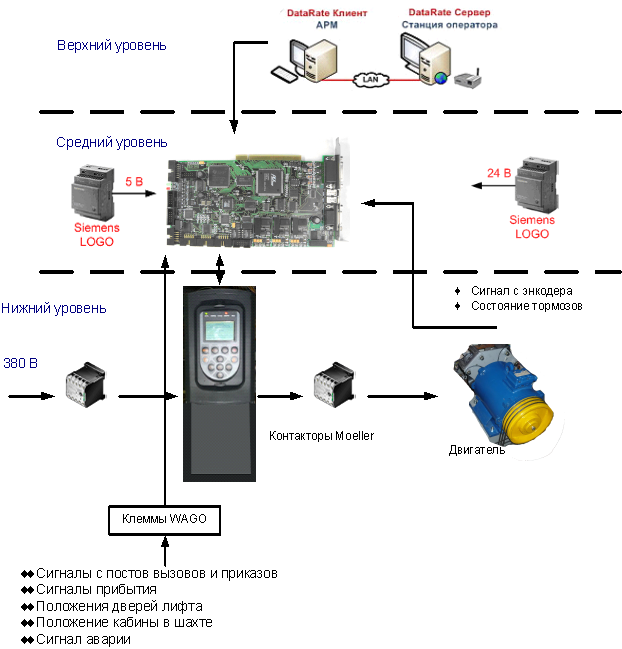
Рисунок 5 - Блок-схема соединения аппаратных средств уровней управления АСУ ТП
2.5 Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП
Для сервоконтроллера ELESY PCI-Servo 4 используется следующее программное обеспечение.
Драйвер под Windows XP/2000/NT.
Утилита для конфигурирования параметров сервоконтроллера с возможностью тестирования периферии.
DLL библиотека с поддержкой набора функций управления сервоконтроллером.
Примеры программирования сервоконтроллера на Borland Delphi, C++ Builder.
Преобразователь частоты реализует векторное управление двигателем, программа работы написана в среде Code Composer Studio v3.1.
2.6 Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена
Обмен информацией между верхним (АРМ оператора) и средним уровнем осуществляется посредством локальной сети PROFIBUS-DP по интерфейсу RS-485.
3. Математическое моделирование системы управления технологическим процессом
3.1 Выбор среды моделирования и разработка математической модели технологического процесса и технологического оборудования с исполнительными электроприводами
Моделирование работы технологического процесса будем проводить в среде MATLAB Simulink, обладающей широкими возможностями выполнения математического моделирования, создавая модель из простых блоков. Также в среде Simulink содержаться блоки, которые позволяют визуализировать процессы моделирования.
Математическое описание процессов в асинхронном двигателе
Математическое описание АД должно отражать особенности эксплуатационных режимов работы нагрузочного моментного ЭП в составе испытательного стенда. Кроме того, в дальнейшем данная имитационная модель рассматривается как объект оптимального управления, на основании которого выполняется структурно-параметрический синтез системы векторного управления АД.
При составлении уравнений электрического равновесия в обмотках АД возьмём за основу систему уравнений для трёхфазной электрической машины и ряд допущений, общепринятых в теории электрических машин переменного тока:
параметры обмоток всех фаз имеют одинаковые значения, т.е. имеет место симметричный режим работы;
магнитное поле электрической машины имеет синусоидальное распределение вдоль воздушного зазора;
принимаем напряжения на выходе ПЧ синусоидальной формы, заведомо не учитывая взаимного влияния между АД и ПЧ по силовому каналу;
не учитываются потери в стали, вызываемые протеканием вихревых токов в магнитопроводе двигателя и его перемагничением;
насыщение магнитной цепи АД не учитывается благодаря наложению ограничений на статорные токи;
эффект вытеснения токов в проводниках ротора пренебрежимо мал ввиду того, что частота токов ротора при питании от ПЧ ограничена рабочим участком механической характеристики.
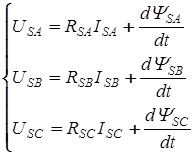
На основании второго закона Кирхгофа и с учётом вышеприведённых допущений, уравнения для ЭДС в обмотках статора и ротора АД можно представить в следующем виде:
 (2.1)
(2.1)
для цепей статора и
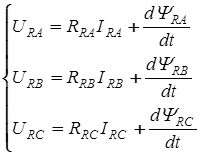 (2.2)
(2.2)
для цепей ротора.
В представленных системах уравнений приняты следующие обозначения:
![]() =
=![]() =
=![]() =
=![]() – активные сопротивления фаз статора;
– активные сопротивления фаз статора;
![]() =
=![]() =
=![]() =
=![]() – активные сопротивления фаз ротора;
– активные сопротивления фаз ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – мгновенные фазные напряжения статора и ротора;
– мгновенные фазные напряжения статора и ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – мгновенные фазные токи в обмотках статора и ротора;
– мгновенные фазные токи в обмотках статора и ротора;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – потокосцепления обмоток статора и ротора.
– потокосцепления обмоток статора и ротора.
Для связи между потокосцеплениями и токами в обмотках воспользуемся законом Ампера, тогда:
 (2.3)
(2.3)
для статора
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды