Автоматическая система управления процессом передвижения пассажирского лифта
После определения количества этажей лифт совершает калибровочный рейс на первый этаж при первом нажатии на любую кнопку вызова или приказа (если лифт не находится на первом этаже).
Если, например, при стоящей на первом этаже свободной кабине поступает вызов с первого этажа, то этот сигнал через мультиплексор 2 поступает на вход микропроцессора RXD – стандартный вход приемника сигналов. Микр
опроцессор составляет события, а именно то, что на запрос о состоянии вызывной кнопки первого этажа пришел импульс от этой кнопки, свидетельствующий о наличии вызова, и формирует на порте PO адрес, по которому из запоминающего устройства 4 поступают команды о дальнейших действиях, выявляется совпадение этажа вызова с этажом положения кабины, и на выходе RD микропроцессора формируется сигнал (в данной схеме выходы WR и RD используются как одиночные разряды порта, служащие для включения реле управления вверх и вниз, а также реле открывания дверей), который после усиления поступает на выход «откр.дверей».
Предположим, что пассажир вошел в кабину и нажал кнопку приказа пятого этажа. В цикле опроса за кнопки вызова и приказа пятого этажа отвечает в данном случае 13-й импульс. При появлении на выходе TXL микропроцессора 13-го по счету импульса он попадает на счётный вход счётчика 1, двоичный код на выходе которого включает канал мультиплексора 2, на входе которого подключен сигнал от кнопки приказа пятого этажа, и с выхода мультиплексора этот сигнал поступает на вход RXD приемника сигналов микропроцессора. Далее, как описано выше, микропроцессор обрабатывает этот сигнал и формирует сигнал на выходе WR, который после усиления поступает на выход «вверх» и обеспечивает включение реле управления вверх в релейной части схемы. При движении вверх счёт этажей осуществляется по датчикам замедления вверх. По прибытии на этаж назначения и выходе всех пассажиров из кабины в блок электронного селектора подается сигнал «Сброс», по которому снимаются сформированные ранее сигналы управления, и лифт готов к движению по вызову или приказу. При движении кабины лифта микропроцессор при помощи мультиплексоров непрерывно опрашивает датчики замедления вверх и вниз, датчик точной остановки, датчики крайних этажей, кнопки вызовов и приказов. Информация, поступающая от этих устройств, обрабатывается микропроцессором, который в соответствии с записанной в запоминающем устройстве программой формирует требуемые сигналы управления.
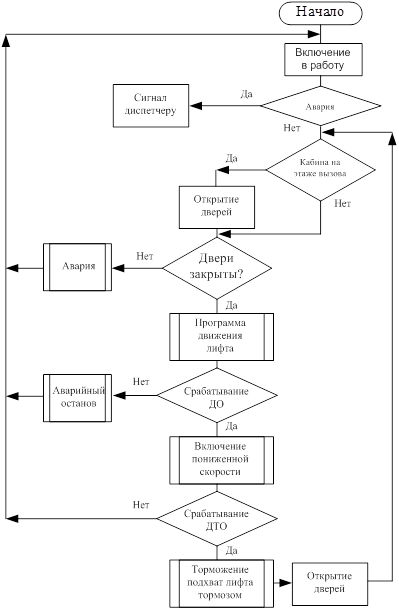
Рисунок 3 – Общий алгоритм функционирования системы управления пассажирским лифтом в режиме «Нормальная работа»
На рисунке 3 приведена блок-схема программы управления лифтом в режиме «Нормальная работа». При закрытых дверях с помощью программы, записанной в запоминающем устройстве, осуществляется опрос постов вызова, и при появлении вызова, проверяется условие нахождения кабины лифты на том же этаже вызова. Если это условие не выполняется, то осуществляется переход к программному блоку «Выбор направления», а при его выполнении формируется сигнал «Открыть дверь». После открывания дверей по завершении выдержки времени или при поступлении сигнала приказа обеспечивается закрывание дверей, решается задача выбора направления движения с учётом взаимного положения этажа назначения и этажа исходного положения кабины. В соответствии с результатами этого выбора включается привод для движения кабины в нужном направлении. В процессе движения кабины осуществляется проверка условия совпадения положения кабины с этажом назначения. При выполнении этого условия формируется сигнал замедления и остановки кабины, открываются двери, дальше управление осуществляется аналогично описанному.
Аналогичные программы формируются для обеспечения работы лифта в других режимах (с учётом особенностей работы в этих режимах). Правда, управление в «Режиме ревизии» обычно выполняют без участия микропроцессорной системы для обеспечения большей безопасности (алгоритм управления в этом режиме достаточно прост а возможность управления в крыши кабины не должна зависеть от работоспособности микропроцессорной системы). При использовании режима группового управления вводят дополнительные программные блоки, выполнение которых зависит от принятого при этом алгоритма управления.
2.2 Функциональная структура системы управления ТП описание функциональных блоков системы
Схема системы управления в режиме нормальной работы представлена на рисунке 4.
В схеме приняты следующие обозначения: ПЛ – привод лифта, ПД – привод дверей, ПВП – посты вызовов и приказов, УРПВ – узел регистрации приказов и вызовов, УВНД – узел выбора направления движения, УОПК – узел определения положения кабины, УЗО – узел замедления и остановки, ДПД – датчики положения дверей, ДСЛ – датчики состояния лифта, УБЗ – узел блокировок и защиты, УВВ – узел выдержки времени, УОЗД – узел открывания и закрывания дверей, ПСУ – позиционно-согласующие устройство, СВ – сигнал движения вверх, СН – сигнал движения вниз, СБ – сигнал большой скорости, СМ – сигнал малой скорости, СЗД – сигнал закрывания дверей, СОД – сигнал открывания дверей, СВВ – сигнал выдержки времени, СВП – сигналы о вызовах и приказах, СНПК – сигнал о наличии пассажира в кабине, СПЗК – сигнал о полной загрузке кабины, СПГЛ – сигнал о прегрузке кабины; СРРЛ –сигнал регулирования разгона лифта; УОЗК – узел определения загрузки кабины, СПК – сигнал положения кабины.
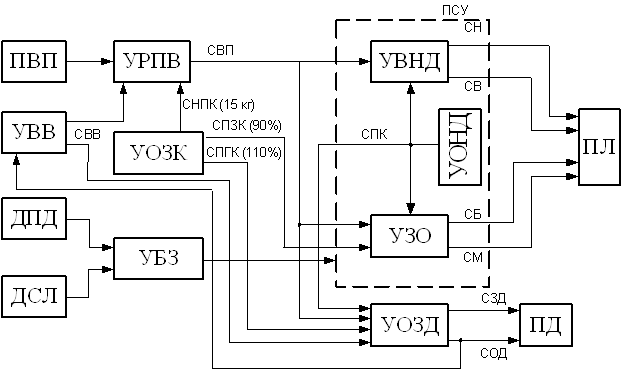
Рисунок 4 – Функциональная структура управления
2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ
Для управления технологическим процессом передвижения пассажирского лифта необходимо наличие трёх уровней управления.
Верхний уровень
В последнее время наблюдается тенденция к оснащению зданий сложным инженерным и коммуникационным оборудованием. Появляется необходимость вести наблюдение за основными системами жизнеобеспечения здания для предупреждения и быстрого реагирования на неисправности. Данную задачу позволяет решить автоматизированная система контроля, управления и диспетчеризации (АСКУД). Её также можно назвать как сервер ЖКХ. В частности для лифтового оборудования АСКУД позволяет:
контролировать положение кабины лифта в режиме реального времени
формировать отчеты о простоях, неисправностях, техническом обслуживании
контролировать доступ в шахту или машинное помещение
контролировать выход лифтового оборудования из строя
В диспетчерскую приходит вся информация с лифтов подключённых к системе. Диспетчер по полученным данным может направить бригаду на ремонт вышедшего из строя оборудования.
На базе обычной SCADA системы реализован диалог взаимодействия диспетчера и поступающих данных. Также ведётся журнал событий в течение месяца.
Средний уровень
На среднем уровне происходит реализация локальных управляющих алгоритмов (управление приводом);
взаимодействие между технологическими объектами управления;
информационный обмен с уровнем III.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды